
上料机器人手臂设计(含CAD零件装配图,ProE三维模型)
无需注册登录,支付后按照提示操作即可获取该资料.
上料机器人手臂设计(含CAD零件装配图,ProE三维模型)(任务书,开题报告,外文翻译,论文说明书15500字,CAD图纸5张,ProE三维图)
摘要
因为电机的驱动技术有着结构简单、价格便宜、环保、维修简单等一系列明显优点,在工业生产中得到及其广泛的应用,已经成为机械自动化生产中不可或缺的重要手段之一,在当今备受人们的关注与重视。还有近年来工业机械化和工业自动化的发展,机械手臂已经能做出类似人手臂的一些机械功能,在实际生产中按已有设定的程序抓取物件或操作机械工具运动的自动化机械装置,且是最早出现在工业生产中的机器人,而且也是最早出现的现代化工业机器人,它可代替人工以实现生产的自动化和高效率,还能在对人体有害环境下代替人工进行稳定的操作,因此现今的机械手被广泛应用于机械制造、冶金、轻工业和原子能等相关的工业生产线中。
首先,根据上料机器人的功能需求进行上料机器人手臂的总体结构分析,提出多种总体结构设计方案,并对多中方案进行检查分析,选出最优的设计方案;其次进行最优的设计方案的具体设计,其中包括传动方案的选择,滚珠丝杠的设计,电机的选择,齿轮传动的设计,轴承和轴的设计计算与校核;再次运用CAD绘制二维工程总装图和主要零件图,细致剖析机器人手臂的内部结构,标注机器人手臂的整体尺寸与基本公差配合;最后用Pro/E做出上料机器人臂部的部分零件图和总装配图,并建立上料机械臂的三维实体模型进行运动仿真分析检查干涉情况;并用ANSYS软件建立机械臂重要零部件的有限元模型,然后进行必要的应力分析并校核强度,最后运用UG建立零件的数控加工过程。
关键词:机械臂;设计;仿真;加工
Design of feeding robot arm
ABSTRACT
Because the motor drive technology has a series of significant advantages, such as simple structure, low cost, no pollution, easy maintenance and so on. Now the motor drive get more and more widely used in industrial production, has become an indispensable important means of automation, have been paid much attention by people. Along with the development of the industrial mechanization and automation in recent years, some of the mechanical arm can imitate the manpower and arm action function, it can grab according to a fixed procedure operating tool to moving objects or automatic operation of the device, and it is the first industrial robots,it is also the first modern robot, it can work hard instead of human to realize mechanization and automation of production, operating in a dangerous environment to protect personal safety, thus it is widely used in machinery, metallurgy, electronics, light industry and atomic energy etc.
First of all, according to the functional requirements of the feeding robot arm for the overall structure analysis, put forward a variety of design of overall structure, and inspection on the analysis, choose the best of all. For the specific design of the best design, including the transmission choose, the design of the ball screw, the choice of motor, the design of the gear transmission, bearing and shaft design calculation and checking; The CAD drawing of two-dimensional engineering assembly diagram and main parts diagram, detailed analyzes the internal structure of the robot arm label the overall size of the robot arm with basic tolerance; Using Pro/E to make feeding robot arm parts of figure and total assembly drawing, and establish the feeding three-dimensional entity model of the robot arm movement simulation analysis to check interference; Using
ANSYS software to establish finite element model of typical components, stress analysis and strength checking, using UG to establish the major parts of nc machining process.
Keyword:Mechanical arm; Design; Simulation; Processing
目 录
摘要 II
Abstract III
1绪论 1
1.1 本论文的学术背景及理论与实际意义 1
1.2 上料机器人手臂的发展现状和未来的发展趋势 2
1.3 本论文研究的主要内容 8
2 上料机械手臂的结构设计 10
2.1 总体方案分析 10
2.2 传动方案的选择 11
2.3 滚珠丝杠的设计 13
2.4 电机的选择 17
2.5 齿轮传动的设计 19
2.6 轴承的选择 25
2.7 俯仰轴的设计 28
3 PRO/E建模和仿真 32
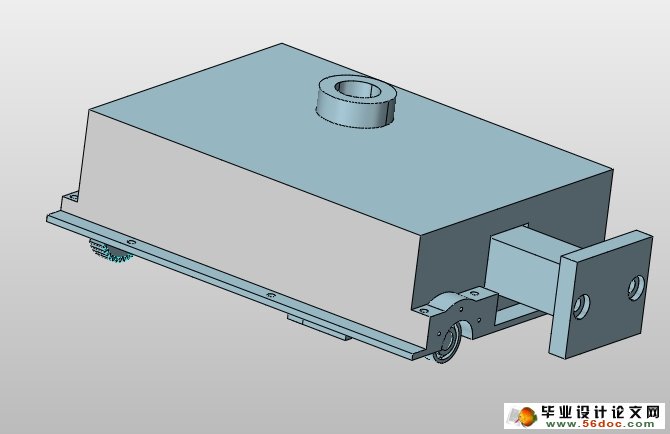
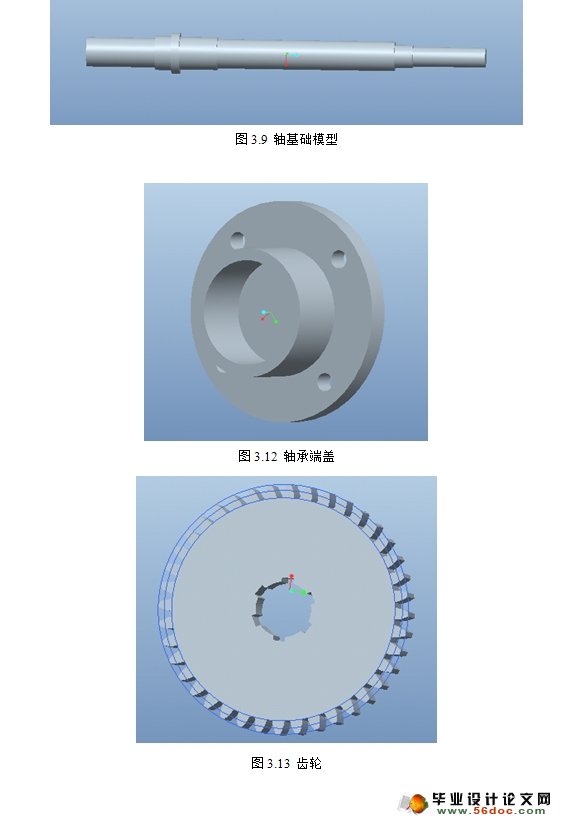
3.1 主要部件建模及其简介 32
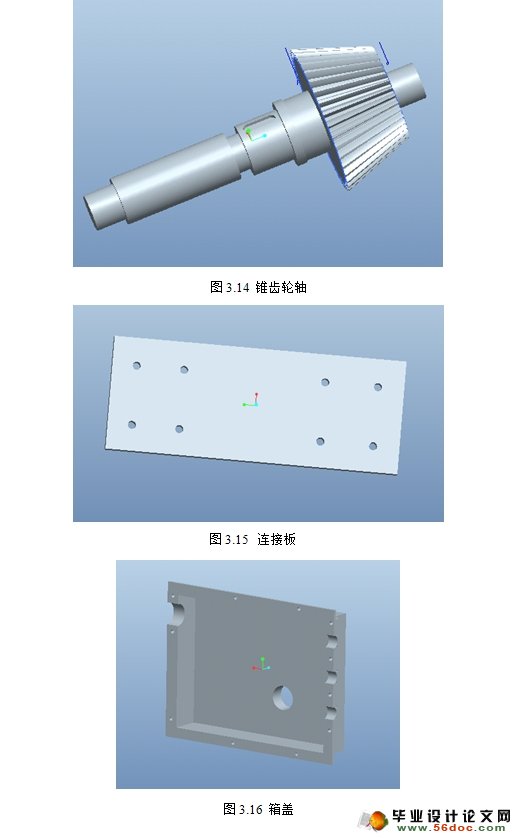
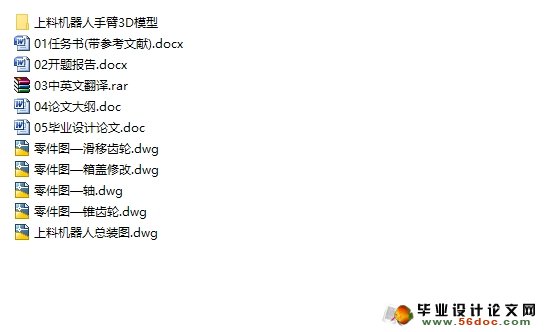
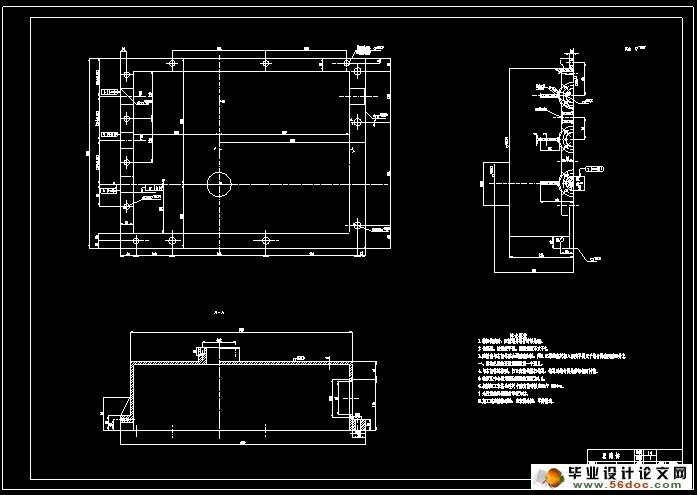
3.2 其他主要三维模型的展示 42
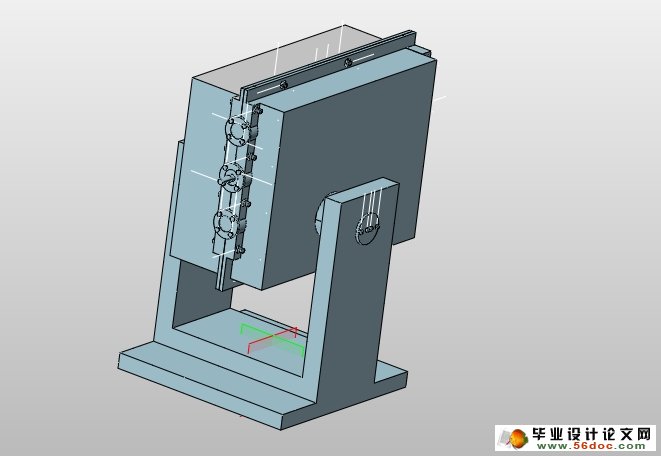
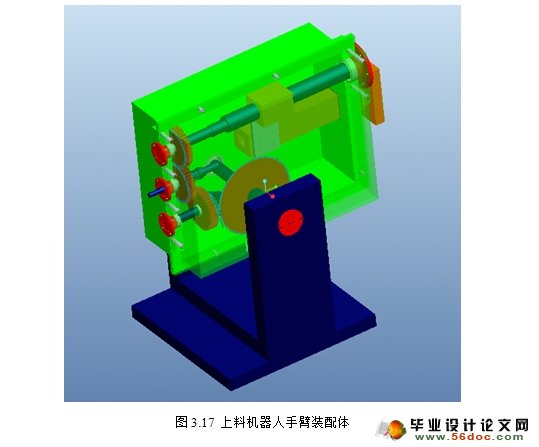
3.3 上料机器人手臂的装配模型 45
4结论 66
参考文献 67
5致谢 69