
基于MSP430单片机的水平仪设计
无需注册登录,支付后按照提示操作即可获取该资料.
基于MSP430单片机的水平仪设计(任务书,开题报告,外文翻译,论文11000字)
摘 要
水平仪在现代工业中具有着广泛的作用。它是一种测量小角度的工具。本文我们将研究一种新的数字式水平仪。它相比于老旧的水平仪将具有测量范围大、测量精度高、可输出的特点。
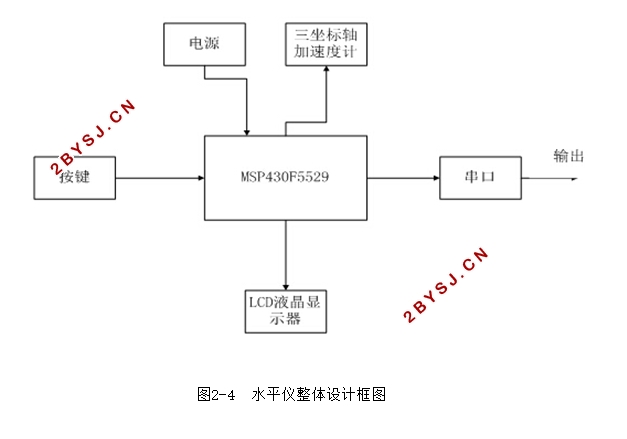
本设计将以MSP430F5529单片机上的三坐标轴加速度计作为核心来进行测量。通过测量重力加速在加速度计的X轴、Y轴和Z轴上的分量,计算出其在水平面上的倾斜角度。由此得到水平度。通过按键控制加速度计的工作,将测量结果显示在液晶屏上并且通过串口将测量数据输出。
经过测试,该数字式水平仪可完成对水平度的测量,在液晶显示屏上显示当前加速度计的各坐标轴偏移量,并且会显示一个立方体模型来模拟当前水平状态,还可以通过串口来输出在电脑上进行显示。
关键词: 重力加速度 水平度 串口
Level design based on MSP430 single chip microcomputer
Abstract
Spirit level has a broad role in modern industry. It is a tool of measuring small Angle.In this paper, we will study a new kind of digital spirit level.It compared to the old spirit level will have many characteristics such as a large range of measurement, high measuring accuracy and can be output.
The three axis accelerometer on the MSP430F5529 single chip microcomputer will be the core to measure in this design. Calculate the Angle in the horizontal plane by measuring the acceleration of gravity in the accelerometer X, Y, and Z axes on the coordinate.Then we can get the levelness. We can control the accelerometer through the button,the result of measurementwill be displayed on the LCD screen and it will be output through the serial por.
After the test, the digital level can complete the measurement of the levelness. On the LCD screen displays the current accelerometer of each coordinate axis offset, and it can output to the computer for display through the serial port.
Keywords: Acceleration of gravity ; Levelness ; Serial port
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 课题研究背景及现状 1
1.2 课题研究内容及意义 2
1.3 本文所做的工作 2
第二章 水平仪总体设计方案 4
2.1 水平仪工作理论 4
2.2 软硬件开发平台 5
2.2.1 软件开发平台 5
2.2.2 单片机的选择及介绍 6
2.3 水平仪整体设计框图 8
第三章 水平仪硬件电路设计 10
3.1 电源供电模块 10
3.2 三轴加速度计模块 11
3.2.1 加速度计介绍 11
3.2.2 SPI通讯模式 12
3.2.3 加速度计校准 13
3.3 键盘控制模块 14
3.4 液晶显示模块 15
3.5 串口发送模块 16
第四章 软件功能实现 19
4.1 程序设计流程图 19
4.2 系统及外设初始化 20
4.2.1 系统配置 20
4.2.2 初始化按键 20
4.2.3 初始化定时器A 20
4.3 液晶显示程序 20
4.3.1 LCD的初始化 21
4.3.2 背光初始化 21
4.3.3 建立字库 21
4.3.4 其他功能函数 22
4.4 串口发送程序 22
4.5主程序设计 23
第五章 水平仪测试 26
第六章 总结和展望 29
4.1 总结 29
4.2 展望 29
参考文献 31
致 谢 32