
四足步行机器人腿机构设计(含CAD装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
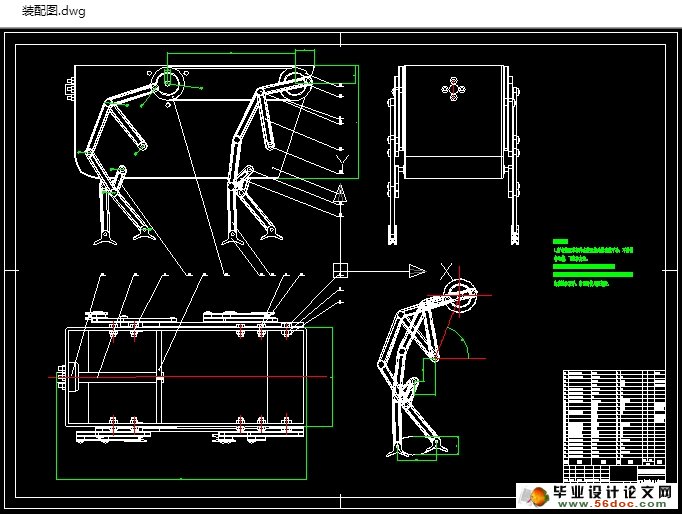
四足步行机器人腿机构设计(含CAD装配图)(任务书,开题报告,中期报告,论文说明书16000字,CAD图纸1张,CAXA图纸1张)
摘 要
本文介绍了国内外四足步行机器人的发展状况应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配展示。同时结合模仿四足动物形态展示出了本次设计。对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。本文对四足机器人腿的单腿结构分析比较详细,进行理性的理解。

目 录
摘 要 I
Abstract II
前 言 IV
1 绪论 1
1.1步行机器人的概述 1
1.2步行机器人研发现状 1
1.3 存在的问题 6
2四足机器人腿的研究 7
2.1腿的对比分析 7
2.1.1开环关节连杆机构 7
2.1.2、闭环平面四杆机构 9
2.2腿的选择与设计 11
2.2.1腿的配置形式 11
2.2.2腿的步态选择与分析 12
2.3腿的设计 14
2.3.1腿的机构分析 15
2.3.2支撑与摆动组合协调控制器 20
2.4 单条腿尺寸优化 23
2.4.1数学建模 23
2.4.2运动特征的分析 25
2.5机器人腿足端的轨迹和运动分析 26
2.5.1机器人腿足端的轨迹分析 26
2.5.2机器人腿足端的运动分析 28
3. 机体设计 30
3.1机体设计 30
3.1.1机体外壳设计 30
3.1.2、传动系统设计 30
3.2进行腿及整个机构辅助设计 34
4.结论 35
4.1论文完成的主要工作 35
4.2结论 35
参考文献 36
致 谢 37