
微小型步行四杆机构的设计(含CAD零件装配图,SolidWorks三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
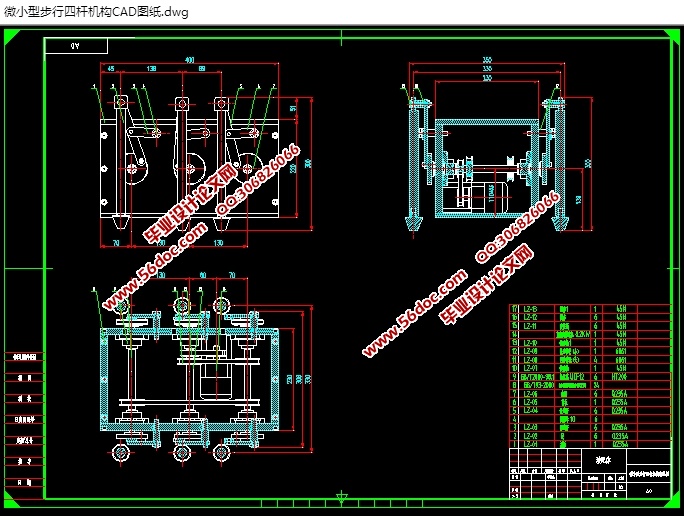
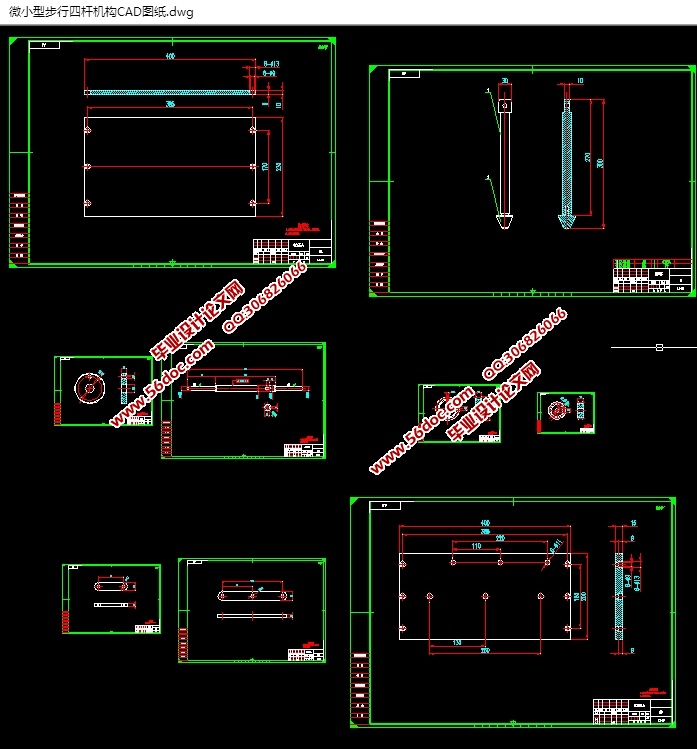
微小型步行四杆机构的设计(含CAD零件装配图,SolidWorks三维图)(论文说明书11200字,CAD图纸10张,SolidWorks三维图)
对于很多特殊地方,像危险性很大或我们难以到达的,比如拆除炸弹,未知探测等相应领域,对以上危险状况深入探寻通常需要机器人来实现。微小型步行机器人是机器人的一个重要分支,步行机器人与超过六英尺,八条腿的机器人相比,由于承载能力强,稳定性好,具有结构简单的优点,所以,全球大批研究者,开始普遍重视它。
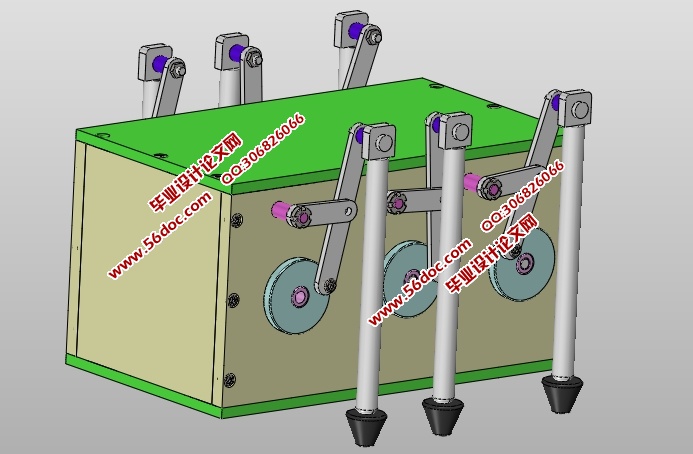
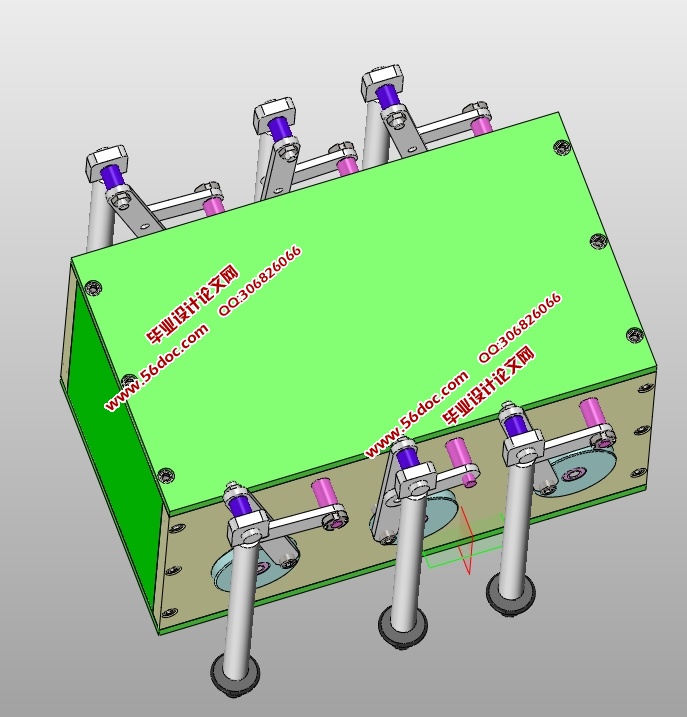
本文主要以四杆机构作为主要执行元件来设计微小型步行四杆机构的整体方案。其原理为对角线同步,腿的活动由曲柄摇杆结构传递,左右前腿动作同等,它详细表现了连杆的弧线特点,当直线段为对等弧线运动轨迹时,机器人就在地上固定不动,当对角曲线的运动轨迹是斜斜线段时,机器人就做步行运动。该机器人主要由直流伺服电机驱动,从而通过曲柄摇杆机构带动同步带轮腿的动作。
关键词:微小型步行机器人;结构;四杆机构;曲柄摇杆
本课题研究的内容
我的微小型步行四杆机构的设计重点是依靠SOLIDWORKS。在设计过程中,了解微小型步行四杆机构的结构特征和三维软件的使用要领。
本文的设计目标是设计一种微小型步行四杆机器人。该机器人能够在不同的底面实现考察,检测等等功用。其研究内容包括:
(1)功能分析与方案设计;
(2)结构设计与三维造型;
(3)运动仿真;
(4)控制系统设计。
2 微小型步行四杆机构总体方案结构的设计
2.1 微小型步行四杆机构的总体方案图
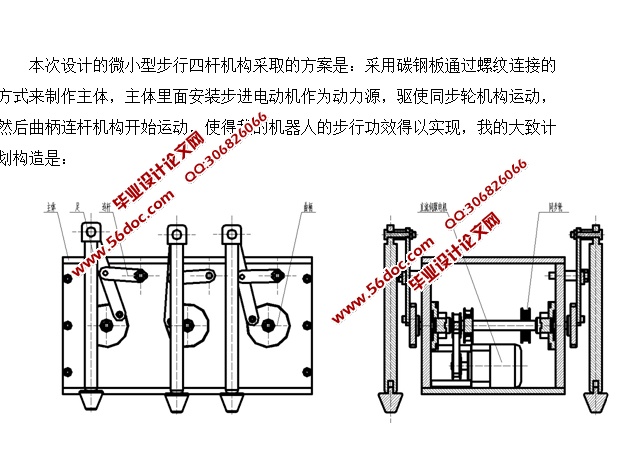
本次设计的微小型步行四杆机构采取的方案是:采用碳钢板通过螺纹连接的方式来制作主体,主体里面安装步进电动机作为动力源,驱使同步轮机构运动,然后曲柄连杆机构开始运动,使得我的机器人的步行功效得以实现,
目 录
摘 要 i
ABSTRACT ii
目 录 iii
1 绪论 1
1.1课题来历与研究的目的以及意义 2
1.2 发展概况 4
1.2.1 国内的发展概况 5
1.2.2 国外的发展概况 7
1.3本课题研究的内容 9
2 微小型步行四杆机构总体方案结构的设计 12
2.1 微小型步行四杆机构的总体方案图 12
2.1.1 方案的比较 14
2.1.2 方案的确定 14
3 四杆机构的设计 18
3.1基础理论知识 20
3.1.1曲柄存在的条件 20
3.1.2急回运动特性和行程运动速比K的关系 20
3.1.3压力角和传动角 20
4 机械传动的设计计算 21
4.1 选择直流伺服电机 21
4.2 同步带传动的设计计算 22 4.3 研究计算轴 23
结论 24
致 谢 25
参考文献 26
附录 一 32
附录 二 37