电动式关节型机器人机械手的结构设计
无需注册登录,支付后按照提示操作即可获取该资料.
电动式关节型机器人机械手的结构设计(任务书,论文说明书17000字,cad图纸8张)
摘 要
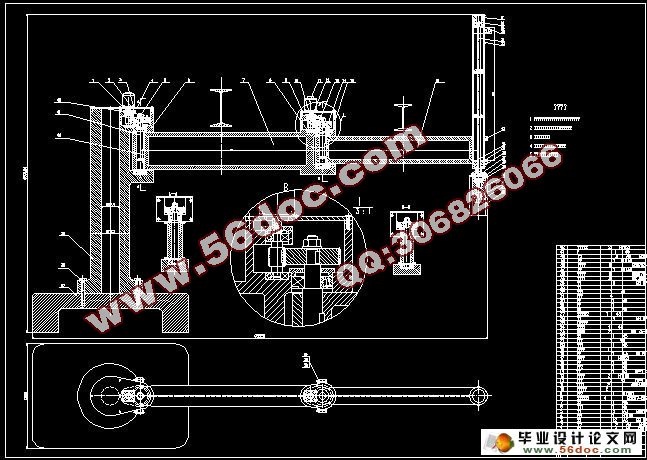
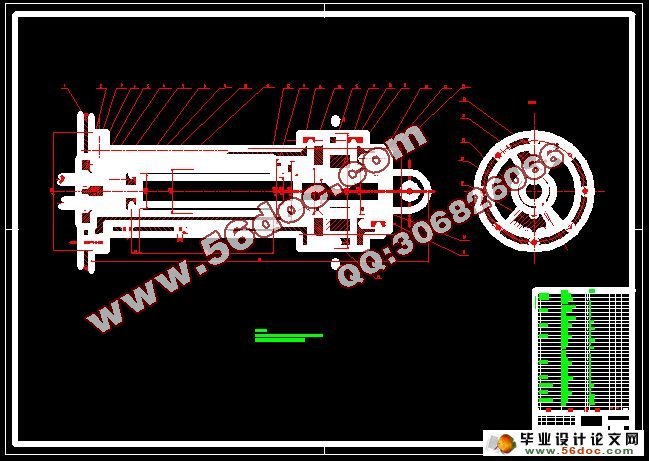
本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构。设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,大大提高了绘图效率和图纸质量,画出了机械手的装配图图。
关键词: 工业机器人 机械手 电动 电动式关节型机器人机械手
Abstract
At first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development briefly. What’s more, the paper accounts for the background and the primary mission of the topic. The paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm. The paper institutes two control schemes of according to the work flow of the manipulator. The paper draws out the work time sequence chart and the trapezium chart.
KEY WORDS: Industrial robot robot electric
electric-type joints robot manipulator
手部机构
手部机构是机器人机械手直接与工件、工具等接触的部件,它能执行人手的部分功能。目前,根据被抓取工件、工件等的形状、尺寸、重量、易碎性、表面粗糙度的不同,在工业生产中使用着多种形式的手部机构,最常见的是钳爪式、磁吸式和气吸式,也有少数的特殊形式。不同形式的手部机构其夹紧力的计算各有不同。
钳爪式手部机构是最常见的形式之一。手爪有两个、三个或多个,其中两个的最多。抓取工件的方式有两种:外卡式和内撑式。从其机械机构特征、外观与功用来看,有多种形式,它们分别是:
(1) 拨杆杠杆式钳爪
(2) 平行连杆式钳爪
(3) 齿轮齿条移动式钳爪
(4) 重力式钳爪
(5) 自锁式钳爪
(6) 自动定心钳爪
(7) 抓取不同直径工件的钳爪
(8) 具有压力接触销的钳爪
(9) 抓勾与定位销十钳爪
(10) 复杂形状工件用的自动调整式钳爪
(11) 同时抓取一对工件的钳爪与内撑式三指钳爪
(12) 特殊式手指钳爪
同时对钳爪的选用也非常重要,应考虑以下几个方面:
1 应具有足够的夹紧力,这样才能防止工件在移动过程中脱落,一般夹紧力为工件重量的2到3倍。
2 应具有足够的张开角,来适应它抓取和松开工件之间较大的直径范围,而且夹持工件中心位置变化要小(即定位误差小)。
3 应具有足够的强度和刚度,以免承受在运动过程中产生的惯性力和震动的影响。
4 应能保证工件的可靠定位
5 应适应被抓取对象的要求
6 尽可能具有一定的通用性
夹持式手部结构由手指(或手爪)和传力机构所组成。其传力结构形式比较多,如滑槽杠杆式、斜楔杠杆式、齿轮齿条式、弹簧杠杆式等。