
基于单片机智能吸尘器的设计(含电路原理图,程序)
无需注册登录,支付后按照提示操作即可获取该资料.
基于单片机智能吸尘器的设计(含电路原理图,程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文19000字,程序,答辩PPT)
摘 要
近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。其中,服务机器人开辟了机器人应用的新领域。服务机器人区别于工业机器人的一个主要特征就是服务机器人是一种适用于具体的方式、环境及任务过程的机器人系统,其活动空间大,具有在非结构环境下的移动性,因此服务机器人大多数是移动机器人。
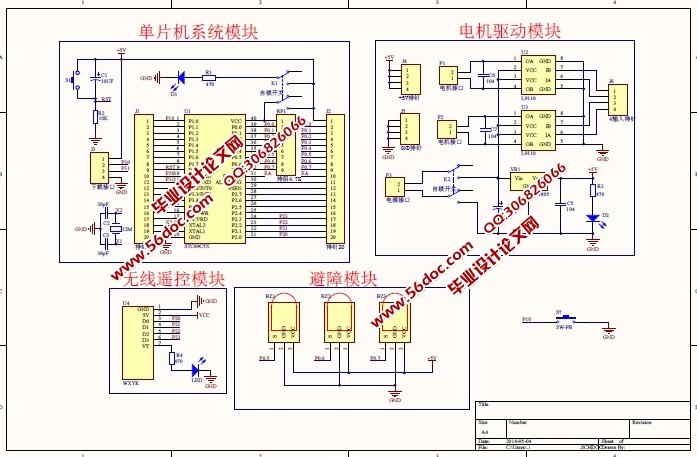
本文针对现有吸尘器系统只能自主行动,智能路径规划不能够全部覆盖完全面积问题,设计出基于单片机的智能吸尘器系统,系统包括智能避障和无线遥控功能,通过无线遥控器可以进行切换。系统包括以STC89C52单片机为核心控制模块电路、以E18-D50NK红外避障传感器搭建的避障模块、无线遥控电路采用2272-M4非锁四路无线遥控模块、电机驱动模块电路采用L9110芯片、以及直流调理芯片LM7805的电源模块电路,最后完成了系统的软件系统设计。
当自主打扫不能完成所有清扫时,可以切换无线遥控功能,根据人为遥控完成自主打扫不能完成的任务。使它可以替代传统的家庭人工清扫方式,使家庭生活电气化、智能化,使科技更好地为人类服务。
关键词:单片机;智能吸尘器;无线遥控
Abstract
In recent years, with the rapid development of computer science and artificial intelligence technology, intelligent robot technology has become a hot research field of modern robotics. Which opened up a new field of service robots robotics applications. A key feature of the service robot is different from the industrial robot service robots is a suitable concrete way, the robot system environment and its mandate, and its activity space, with mobility in unstructured environments, so the majority of service robots mobile robots.
In this paper, the existing system can act autonomously vacuum cleaner, intelligent path planning can not completely cover the entire area of the problem, design a microcontroller-based intelligent vacuum cleaner systems, obstacle avoidance system and a wireless remote control functions include intelligence, through a wireless remote control can be switched. System includes STC89C52 microcontroller core control module circuit to E18-D50NK infrared obstacle avoidance sensors built avoidance module, wireless remote control circuit using 2272-M4 non-lock four wireless remote control module, motor drive module circuit using L9110 chip, and DC conditioning circuit chip LM7805 power supply module, and finally completed the software design of the system.
When the self-cleaning can not complete all the cleaning, you can switch wireless remote control, remote control based on artificial self-cleaning can not complete the task. So that it can replace the traditional manual cleaning way home to make family life electrification, intelligent, so that science and technology to better serve humanity.
Keywords: microcontroller; intelligent vacuum cleaner; wireless remote control
智能吸尘器系统总体设计
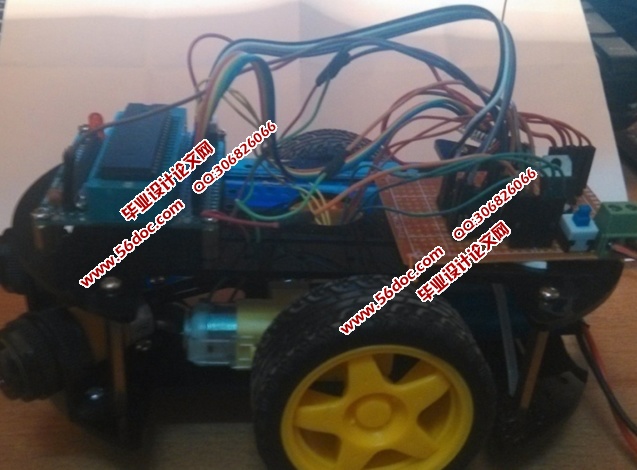
智能吸尘器系统主要包含避障检测模块、无线遥控模块、单片机控制模块、电机驱动模块与供电电源模块,完成智能吸尘器在自主清扫过程中避障的功能和人为遥控功能,机械系统采用稳定、灵活、简单的三轮运动系统,后轮由直流电机驱动,后轮直径为65mm,宽度为25mm,两轮距离130mm,前轮为万向轮起到支撑和平衡的作用。
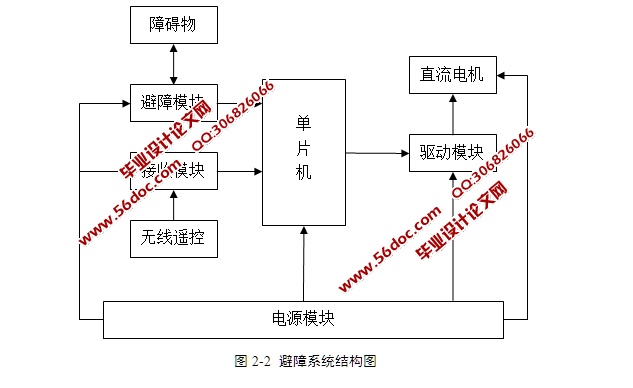
智能吸尘器系统结构图如图2-2所示,智能吸尘器前端安装有三个红外光电开关,用于检测障碍物,前方无障碍输出高电平,有障碍输出口电平会从高电平变成低电平,信号为TTL电平可直接与单片机连接,单片机检测三个红外开关引脚电平,并做出相应的决策,输出驱动信号控制电机驱动模块,从而控制电机,完成吸尘器的智能避障功能。系统可通过遥控器切换吸尘器功能,当切换到遥控模式时,可根据遥控器发出的指令完成吸尘器的前进、后退、左转和右转功能。同时采用PWM脉冲调速技术,保证智能吸尘器稳定可靠运行。
目 录
第1章 绪论 1
1.1 课题研究的背景 1
1.2 国内外研究现状综述 1
1.3 本文研究内容 4
第2章 智能吸尘器系统总体设计 5
2.1 智能吸尘器系统的搭建 5
2.2 系统方案论证 5
2.3 智能吸尘器系统总体设计 9
2.4 本章小结 10
第3章 智能吸尘器硬件电路设计 11
3.1 单片机控制电路设计 11
3.2 避障模块电路设计 14
3.3 无线遥控模块 15
3.4 电机驱动模块电路设计 18
3.5 电源模块电路设计 20
3.6 吸尘和毛刷电机的驱动 22
3.7 本章小结 22
第4章 智能吸尘器软件系统设计 23
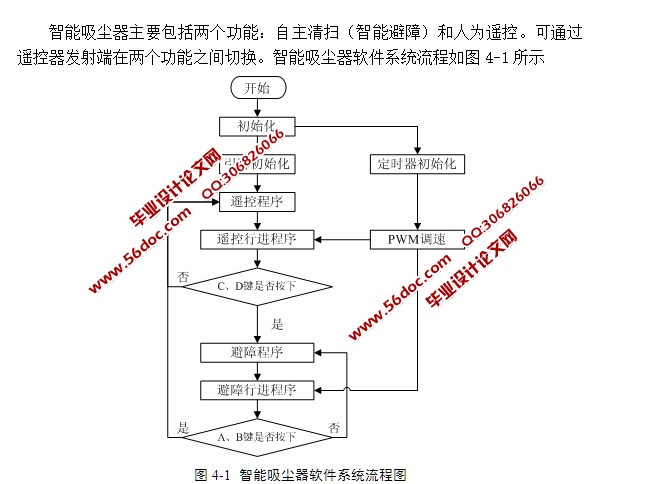
4.1 系统控制流程 23
4.2初始化子程序 24
4.3 PWM调速子程序 25
4.4 行进子程序 26
4.5 本章小结 30
第5章 系统安装与调试 31
5.1 智能吸尘器的硬件安装 31
5.2 软件开发调试 33
5.3 吸尘器整体系统调试 36
5.4 本章小结 37
结 论 38
参考文献 39
致谢 41
附件1 电路图 42
附件2 源程序 43