
搬运机械手机构设计与控制电路设计(含CAD零件图装配图,电气图)
无需注册登录,支付后按照提示操作即可获取该资料.
搬运机械手机构设计与控制电路设计(含CAD零件图装配图,电气图)(任务书,开题报告,毕业论文22500字,CAD图纸13张,答辩PPT)
摘要
机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。机械手能模仿人手和臂的某些动作功能,用于按固定程序抓取、搬运物体或操作工具的自动操作装置。它可以代替人的繁重劳动以实现生产自动化和机械化,能在有害环境下操作以保证人的安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。在工业部门中应用的机械手称为工业机械手。
工业机械手是近代自动控制领域中出现的一项新技术,是近几十年发展起来的一种高科技自动生产设备。涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。它的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。
设计包含了机械手的结构设计及控制电路设计,其中在结构设计这方面包含了机械手的手部结构、腕部结构、臂部结构设计及机身的整体结构设计。在控制电路设计这方面包含了液压驱动控制设计、器件的选择设计、PLC可编程自动控制电路设计。本毕业设计《搬运机械手机构与控制电路设计》非常适合作为机械电子工程这门专业大学四年的一个总结。因为其中包含了机械设计与电路设计,是机械与电子的结合体,能充分体现这门专业的内涵。
关键词:机械手;手部;腕部;臂部;机身;液压;电路
Design of Manipulator Mechanism and Control Circuit
ABSTRACT
Manipulator is a kind of automatic control and from the new process to change the multi-function machine, he has multiple degrees of freedom, can carry objects to complete the work in different environments. Mechanical hand can imitate hand and arm function for some action, according to a fixed program to crawl, moving objects or to operate the automatic tool operation device. It can replace people arduous labor to realize production automation and mechanization, can operate under the hostile environment to guarantee the security of the person, and so it is widely used in machinery manufacturing, metallurgy, electron, light industry and atomic energy industries. In the industrial sector in the application of the mechanical hand is called the industrial manipulator.
Industrial machinery hand is the modern automatic control in the field of a new technology developed in recent years, is a high-tech automated production equipment. Involves mechanics, mechanical, electrical and hydraulic technology, the automatic control technology, sensor technology and computer technology and other fields of science, is an interdisciplinary comprehensive technology. It is characterized by a variety of programming to complete the expected operation, in the structure and performance of both people and machines to their respective advantages, especially in human intelligence and adaptability. Mechanical hand operating accuracy and environment to complete operations capability, in the national economy has a broad development space.
This design includes the structure of the manipulator design and the control circuit, wherein the structure design that incorporates a mechanical hand, wrist, arm structure structure structure design and the overall structure of the design. Early control circuit design which contains a hydraulic drive control design, choice of sensors design, PLC programmable automatic control circuit design. This graduation design" handling manipulator mechanism and control circuit design" is suitable for the mechanical electronic engineering this specialized university four years in a summary. Because of which includes the mechanical design and circuit design, mechanical and electronic integration, can fully reflect the professional connotation.
Key words: mechanical hand; hand; wrist; arm; the fuselage; hydraulic circuit
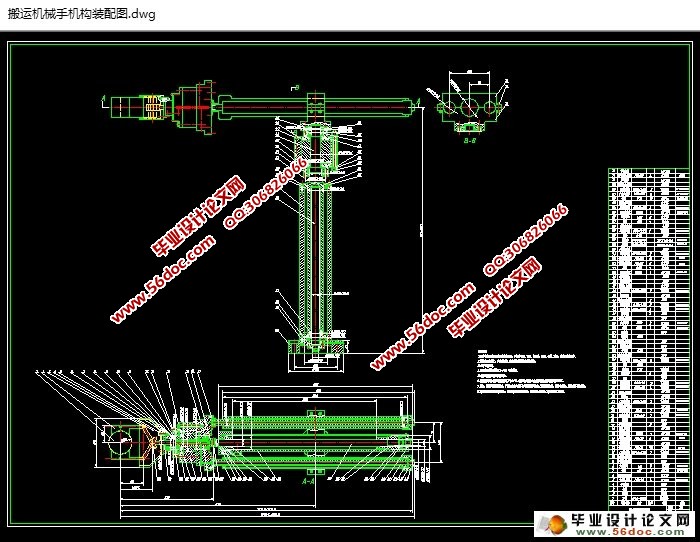
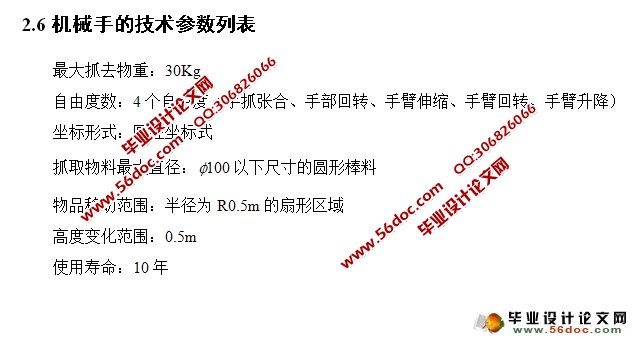
机械手的机械结构主要手抓、手腕、手臂、和机身组成,包括由两个液压回转缸和三个液压伸缩缸,采用液压驱动方案控制机械手运动,用电磁阀控制的液压缸来实现机械手的上升、下降、伸缩、翻转运动及夹紧工件的动作,采用可编程序控制器对机械手实现自动控制。该设计将实现对直径 以下尺寸、重高达30kg的圆形棒料在移动范围半径为0.5m的扇形区域,高度变化范围为:0.5m的区域内进行可编程控制搬运。
目录
第一章 绪论 1
1.1机械手的研究概况 1
1.2机械手发展方向 1
1.3工业机械手在生产中的应用 2
1.4本设计中研究的主要内容 3
第二章 搬运机械手的总体设计方案 4
2.1机械手的组成 4
2.2机械手基本结构的选择 4
2.3机械手的执行机构 4
2.4机械手的驱动机构 4
2.5机械手的控制方式选择 5
2.6机械手的技术参数列表 5
第三章 搬运机械手手臂各部件的设计 6
3.1机械手手部的设计计算 6
3.1.1手部设计基本要求 6
3.1.2 手部机构的选择 6
3.1.3手抓的设计计算 6
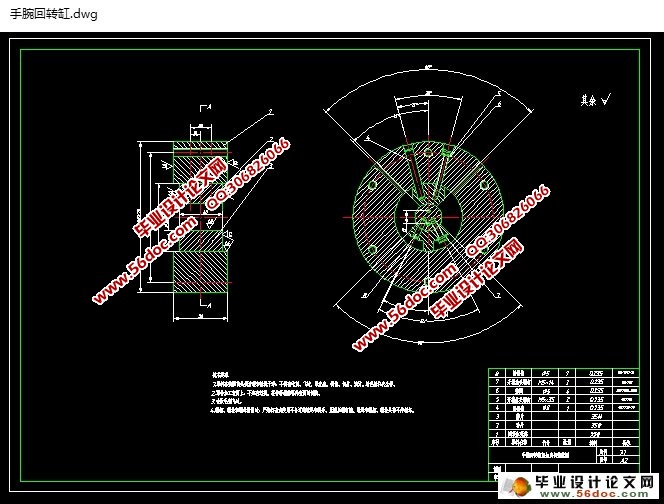
3.2腕部的设计计算 17
3.2.1腕部设计基本要求 17
3.2.2 腕部机构的选择 17
3.2.3腕部的设计计算 18
3.3臂部的设计计算 24
3.3.1臂部设计基本要求 24
3.3.2 臂部机构方案的选择 25
3.3.3臂部的设计计算 27
第四章 机身的设计计算 40
4.1机身的总体设计 40
4.2机身的升降机构设计计算 41
4.2.1手臂偏重力矩的计算 41
4.2.2升降导向立柱不自锁条件分析计算 42
4.2.3机身升降液压缸驱动力矩的计算 43
4.2.4手臂升降液压缸参数计算 44
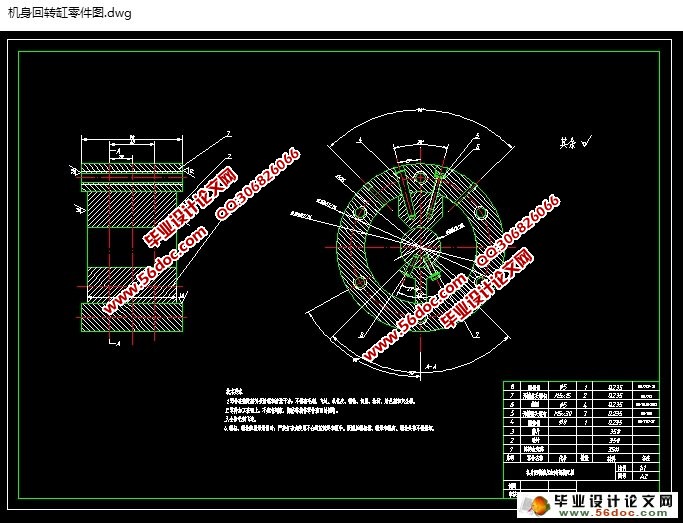
4.3机身的回转机构设计计算 49
4.3.1机身回转液压缸驱动力矩计算 49
4.3.2机身回转液压缸主要参数 51
4.3.4机身回转液压缸螺钉的计算 52
4.3.5动片与输出轴间的连接螺钉计算 53
4.3.6机身回转液压缸筒的壁厚校核 54
4.4联接板的设计 55
4.4.1联接板的介绍及作用 55
第五章 液压驱动系统与控制电路的设计 57
5.1驱动系统设计要求 57
5.2驱动系统设计方案 57
5.3驱动系统设计 58
5.3.1分功能设计分析 58
5.3.2液压泵的确定与所需功率计算 59
5.4控制电路设计 66
参考文献 67
致谢 68
附录A 69
附录A
1 搬运机械手机构装配图 A0 图1
2 机身回转缸内部装配图 A2 图2
3 手腕回转缸内部装配图 A2 图3
4 花键套 A4 图4
5 花键轴 A4 图5
6 手抓驱动液压缸 A2 图6
7 手腕回转缸端盖 A3 图7
8 升降缸活塞杆 A2 图8
9 上连接板 A3 图9
10 下连接板 A2 图10
11 机身底座 A2 图11