
运载机器人的设计制作(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
运载机器人的设计制作(含CAD零件图装配图)(论文说明书10000字,外文翻译,CAD图纸6张)
摘 要
机器人是一种可编程的,能执行某些操作或移动动作的自动控制机械。本课题的主要任务是设计并制作自动机器人“航母”并在“第四届CCTV杯大学生机器人电视大赛”中实现该机器人的预定任务。
在设计说明书中,首先介绍了本组所设计机器人的基本功能和主要技术参数,其次是就机构的工作原理、机动原理进行了详细的介绍同时对机构进行了平衡计算强度校核并绘出了装配图。
我们设计的机器人为多功能机器人,它的主要参数均符合设计要求,它的主要功能有:行走、输送、外围火炬投球、外围篝火盘投球。
[关键词]:自动控制 机动原理 弯曲强度
Abstract
A robot is a machine which can be programmed to Perform some tasks which involve manipulative or locomotive actions under automatic control. The main roles of the subject is design and make the motor robot, who is named “AIRCRAFT CARRIER ”, then we will attend the “University student's robot TV match of the fourth CCTV cup”.to finish the predeterminate tasks.
In this project, first we introduce the basic functions and main technology parameters of the robot. Then we declare the working elements and the mobile elements in detail . At the same time, we count the winding intensity and draw the constructional blueprint.
The robot that we designed is the multi-functional robot, its main parameter accords with the designing requirement , its main function is as follows, walk , transport , peripheral torch shoot ball , peripheral bonfire dish shoot the ball.
Key words:Auto-control Mobile elements Winding Intensity
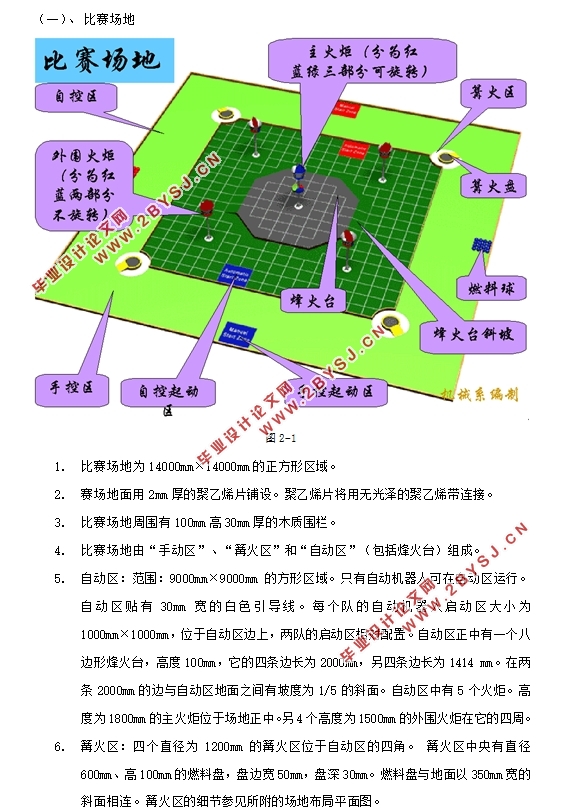
该方案是运载机器人设计,设计了这台名为“航母”的自动机器人本机器人可靠性高,经济合理外形美观,体积、重量合理,能耗小,效率高,主要参数均符合设计要求,它可以实现以下方面功能:
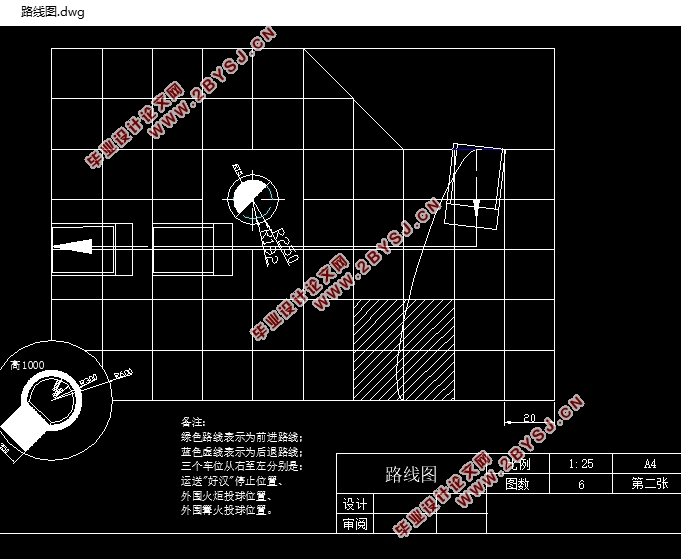
(一)、行走:在电机带动下依靠寻线器对场地上的白色引导线的追踪可实现在场地中自由行走。
(二)、输送:将名为“好汉”的自动机器人运送至八边形烽火台上。
(三)、外围火炬投球:在自动控制下到达预定地域后通过手臂自动对外围火炬投球。
(四)、外围篝火盘投球:在自动控制下到达预定地域后又篝火盘投球装置对特定的外围篝火盘投球。
该设计方案的工作原理及比赛规则的简述:
一)、行走功能的实现
“航母”机器人的行走功能主要由车体底盘上两个500rpm的电机提供动力带动两前轮以前驱的运动方式实现的,转向功能由车体后部的两个万向轮配合两个前驱电机的差速来实现。
(二)、输送功能的实现原理
机器人起动后依靠两电机的差速使机器人呈圆弧轨迹行走以一定角度与八边形烽火台接触实现输送机动机器人“好汉”的功能。
(三)、外围火炬投球功能的实现原理
当机器人到达预定地点手臂上的电机通过与电机相连的一个带轮依靠带传动传递动力使手臂相对主支撑杆旋转;当手爪上的“S”型开关接触到“火焰”挡板后脱开与手爪底板的连接,使球落入火炬内。
(四)、外围火炬投球功能实现原理
投球装置主要由一个装有直径为?270mm橡胶轮的500rpm电机和一块木制挡板以及一个球库组成,机器人到达投球位置后由电机给橡胶轮一定转速后,球库放出一个球,球在橡胶轮和挡板的挤压下被以一定速度呈反向旋转状态的情况下抛出落入篝火盘实现投球功能。


目 录
摘要
Abstract
一、 机器人竞赛及机器人发展史简介……………………………………(1)
二、 比赛规则的简述………………………………………………………(6)
三、“航母”机器人工作说明书………………………………………… (9)
四、“航母”机器人的特点和功能……………………………………… (10)
1. 行走的特点和功能…………………………………………………… (10)
2. 输送的特点和功能…………………………………………………… (10)
3. 外围火炬投球的特点和功能………………………………………… (10)
4. 外围篝火盘的特点和功能…………………………………………… (10)
五、设计方案的拟定………………………………………………………(10)
六、机构结构特点分析………………………………………………… (12)
1. 手臂…………………………………………………………………… (12)
2. 主支撑杆……………………………………………………………… (12)
3. 底盘…………………………………………………………………… (12)
4. 篝火盘投球装置……………………………………………………… (12)
七、主要技术参数及尺寸拟定………………………………………… (12)
八、工作原理的简述………………………………………………………(13)
九、主要零部件强度校核计算……………………………………………(14)
总结…………………………………………………………………………(17)
致谢信………………………………………………………………………(18)
英文资料……………………………………………………………………(19)
译文…………………………………………………………………………(25)
参考资料……………………………………………………………………(30)