
风电涂刷机器人及其恒力装置设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
风电涂刷机器人及其恒力装置设计(含CAD零件图装配图)(任务书,开题报告,外文翻译,论文说明书13500字,CAD图5张)
摘要
本课题设计的风电涂刷机器人及其恒力装置,其加工对象是风电叶片模型,为其设计一款合适的涂刷机器人,并针对风电叶片涂装的特点设计一种能够实现恒力涂刷的装置。就目前来说,国内的风电叶片涂装主要是依靠喷漆和人工涂刷,国内无叶片涂刷专用机器人生产企业,因此该风电涂刷机器人及其恒力装置的设计对我国风电叶片加工设备的研究具有很高的现实利用意义。
为了能够设计出涂刷机器人,首先是通过查阅跟机器人和风电叶片有关的资料来进行理论部分的剖析,然后进行原理分析验证,设计符合加工要求的涂刷头。同时对该风电叶片涂刷机器人的工作原理、装置组成和总体方案等进行了分析,对风电叶片涂刷机器人进行了机构设计和尺寸计算,并进行了必要的刚度校核,通过三维设计软件solid works对风电叶片涂刷机器人进行了三维仿真建模,经验证可以使用并满足要求,所得结果对于实际生产有重要意义。
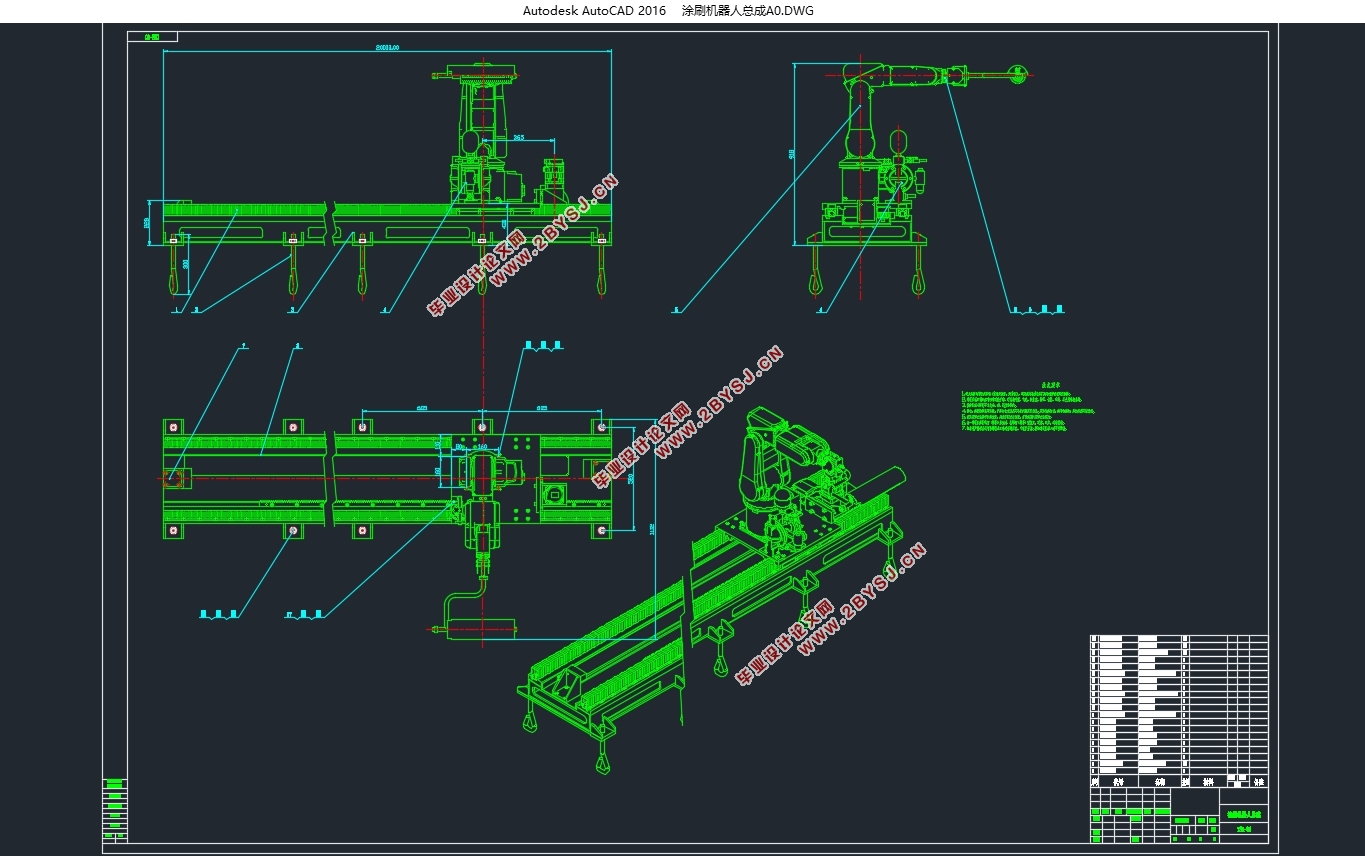
论文主要研究了恒力装置设计应用和导轨系统总成设计,提高了表面的涂刷质量和效果,降低了机器人手臂的负载。恒力装置采用恒力弹簧+机器人控制系统的形式,具有控制精度高、反应迅速、灵敏度好的特点。
本文的特色:涂刷头部分出漆采用自吸式结构,通过流量控制阀调节流量,进而根据加工要求调节涂层厚度。涂刷机构设计简单,结构紧凑且满足加工要求,节约了作业空间。导轨采用埋地式导轨,在不加工时不占用空间,提高了空间利用率。
关键词:恒力加工;自吸式;多向缓冲
Abstract
The wind power brushing robot and its constant force device designed in this project are processed by a wind turbine blade model, and a suitable brushing robot is designed for it, and a constant force brushing is designed for the characteristics of the wind power blade coating. s installation. At present, the domestic wind-powered blade coating is mainly based on painting and manual brushing, and domestic non-blade-painting robot production enterprises, so the design of the wind-powered brushing robot and its constant force device will be applied to the wind power blade processing equipment in China. Research has a high degree of practical significance.
In order to be able to design a painting robot, first of all, the theoretical part is analyzed by referring to the data relating to the robot and the wind turbine blade, and then the principle analysis and verification are performed, and a coating head conforming to the processing requirements is designed. At the same time, the working principle, device composition and overall scheme of the brushing robot of the wind power blade are analyzed. The mechanism design and size calculation of the brushing robot of the wind power blade are carried out, and the necessary stiffness check is performed. The three-dimensional design software is used to solidify the solid. The work carried out a three-dimensional simulation modeling of the wind-powered blade brushing robot. After verification, it can be used and meet the requirements. The results obtained have important significance for actual production.
The paper mainly studied the design and application of the constant force device and the design of the rail system assembly, improved the brushing quality and effect of the surface, and reduced the load of the robot arm. The constant force device adopts the form of constant force spring + robot control system, which has the characteristics of high control accuracy, rapid response, and good sensitivity.
The characteristics of this article: The self-priming structure is adopted for the painting part of the brush head, and the flow rate is adjusted through the flow control valve, and then the coating thickness is adjusted according to the processing requirements. The brushing mechanism is simple in design, compact in structure, and satisfies the processing requirements, thereby saving the working space. The rails use buried rails, which do not take up space when they are not processed and improve the space utilization.
Keywords:constant force machining; self-priming; multidirectional buffering
基本技术参数选择
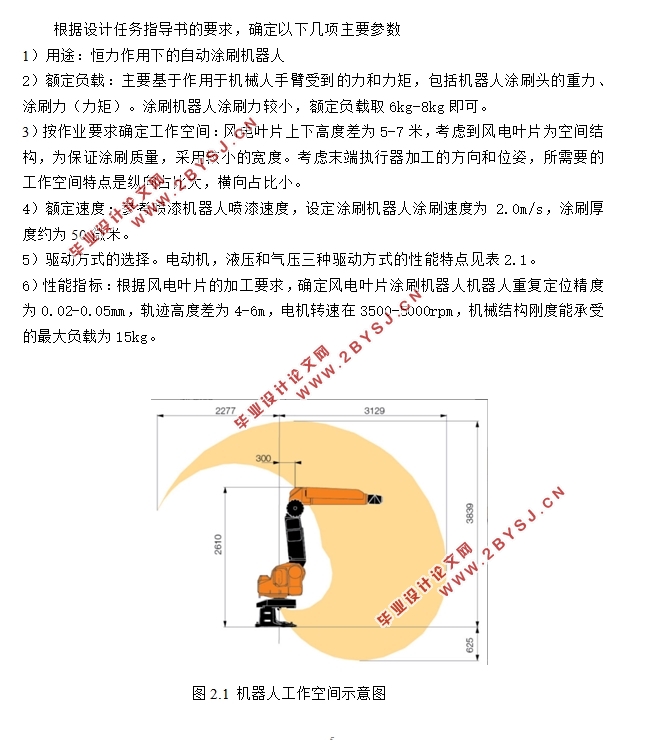
根据设计任务指导书的要求,确定以下几项主要参数
1)用途:恒力作用下的自动涂刷机器人
2)额定负载:主要基于作用于机械人手臂受到的力和力矩,包括机器人涂刷头的重力、涂刷力(力矩)。涂刷机器人涂刷力较小,额定负载取6kg-8kg即可。
3)按作业要求确定工作空间:风电叶片上下高度差为5-7米,考虑到风电叶片为空间结构,为保证涂刷质量,采用较小的宽度。考虑末端执行器加工的方向和位姿,所需要的工作空间特点是纵向占比大,横向占比小。
4)额定速度:参考喷漆机器人喷漆速度,设定涂刷机器人涂刷速度为2.0m/s,涂刷厚度约为50微米。
5)驱动方式的选择。电动机,液压和气压三种驱动方式的性能特点见表2.1。
6)性能指标:根据风电叶片的加工要求,确定风电叶片涂刷机器人机器人重复定位精度为0.02-0.05mm,轨迹高度差为4-6m,电机转速在3500-5000rpm,机械结构刚度能承受的最大负载为15kg。

目录
1绪论 1
1.1课题背景 1
1.2风电叶片的结构及制造工艺 1
1.2.1风电叶片的结构设计 1
1.2.2风电叶片材料选择 2
1.2.3风电叶片的翼型 2
1.3风电叶片涂装 3
1.3.1涂装的定义及意义 3
1.3.2涂装过程分析 4
1.3.3涂刷系统方案 4
1.3.4涂料选择 5
1.4论文主要研究内容 5
2 风电涂刷机器人的总体方案研究 6
2.1基本技术参数选择 6
2.2总体方案设计 8
2.2.1运动功能方案设计: 8
2.2.2传动系统方案设计: 8
2.3风电叶片涂刷机器人结构组成 9
2.3.1机械系统 9
2.3.2控制系统: 10
2.4风电涂刷机器人的控制策略 11
2.4.1分层递阶控制结构 11
2.4.2风电叶片涂刷机器人涂刷过程 11
3 涂刷头设计及计算 13
3.1 涂刷头方案设计及选用 13
3.2涂刷头轴部设计计算及刚度校核 13
3.2.1涂刷头轴内径、外径设计计算 14
3.2.2轴的钢度校核 15
3.3滚芯支架造型设计 16
3.3.1出漆量的计算 16
3.3.2 出漆孔数量及尺寸设计 16
3.4涂刷头涂刷毛芯材料选用及供漆软管选型 17
3.4.1涂刷层材料选择 17
3.4.2供漆软管选型 18
3.5弯管结构设计 18
3.6 恒力装置设计 19
3.6.1恒力装置要求 19
3.6.2恒力装置方案 19
3.6.3恒力装置连接部位 20
3.6.4存在的不足 20
4 风电叶片涂刷机器人选型 21
4.1风电叶片涂刷机器人负载 21
4.2风电叶片涂刷机器人选型参数 21
4.3电机参数 23
5风电叶片涂刷系统的导轨总成设计 25
5.1 导轨方案选择 25
5.1.1导轨类型选择 25
5.1.2精密导轨及滑块选型 26
5.2导轨数控系统及精密减速机选型 26
5.2.1导轨数控系统选型 26
5.2.2精密减速机选型 27
5.3齿轮齿条选型 28
5.4导轨附件 28
5.4.1防护罩 28
5.4.2拖链 29
5.5 导轨润滑系统 29
6 总结与收获 31
参考文献 32
致谢 34