
大电机线圈包带头的运动机构总体设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
大电机线圈包带头的运动机构总体设计(含CAD零件图装配图)(论文说明书10000字,CAD图纸9张)
3. 研究内容
3.1爪杆旋转装置
爪杆旋转的方式是采用气压油缸将液体的压力能转换成机械能,从而使爪杆进行旋转,爪杆旋转装置主要由旋转主轴、气压油缸和齿轮组成。通过气压油缸带动一对啮合齿轮实现。
3.2 爪杆
采用气压式拉紧装置,主要有夹紧油缸和爪杆两大部分,通过爪杆的选择,以及夹紧油缸的选择,并计算出拉紧力。
3.3气压控制系统
气压控制系统由各自独立的气压回路组成,主泵通过各气压回路控制油缸和气压油缸,使机械爪产生相应动作。
4 研究方案
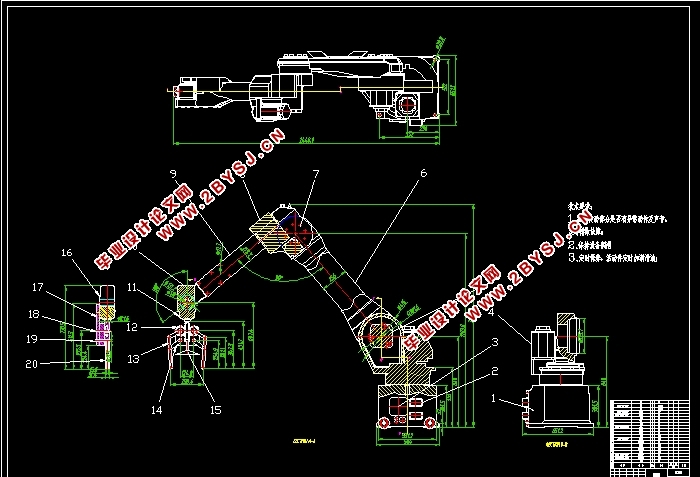
1 总体方案
大电机线圈包带头的运动机构主要由爪杆、爪杆、升降旋转机构、动力装置和连杆旋转机构五部分组成。其总体设计方案如图4-1所示。夹紧油缸和爪杆旋转装置连接在一起,由动力装置提供动力,使爪杆能实现旋转和夹紧松开的操作。连杆旋转机构以及升降旋转机构其动力也是由动力装置提供来使机械爪产生相应动作。
由于电机控制爪手力度不够,本次设计爪手优化后使用气压缸形式,保证抓取塑胶框力度足够。
专用大电机线圈包带头的运动机构结构在纵向和横向上运动控制起来是比较复杂的,也是本次毕业设计所要重点设计的,但是本次设计主要是设计该运动系统的机械传动方面,而对具体的电气控制方面的设计涉及的不多。横向机械传动方面的设计主要如下:一、首先在电机的带动下,通过联轴器与滑轨连接,如同上述纵向滑轨带动一样,这里也需要一个底座来实现滑轨带动承载旋转器的底板运动,从而实现专用大电机线圈包带头的运动机构结构在横向的运动,主臂旋转采用电机带动,爪手位置采用气压缸动力,码垛要求:将乳品生产线流出的乳品箱码垛至托盘,码垛效率,10托盘/h,码垛高度小于等于1.3m。
额定负荷:200Kg;工作半径R1.8m;重复精度0.5mm;轴数4-6轴,串联连接;
目 录
摘要 2
一、绪论
1. 国外研究现状 6
2. 国内研究现状 6
3. 研究内容 6
4 研究方案 7
二、大电机线圈包带头的运动机构材料介绍及选择 8
三、大电机线圈包带头的运动机构主要零部件设计计算 10
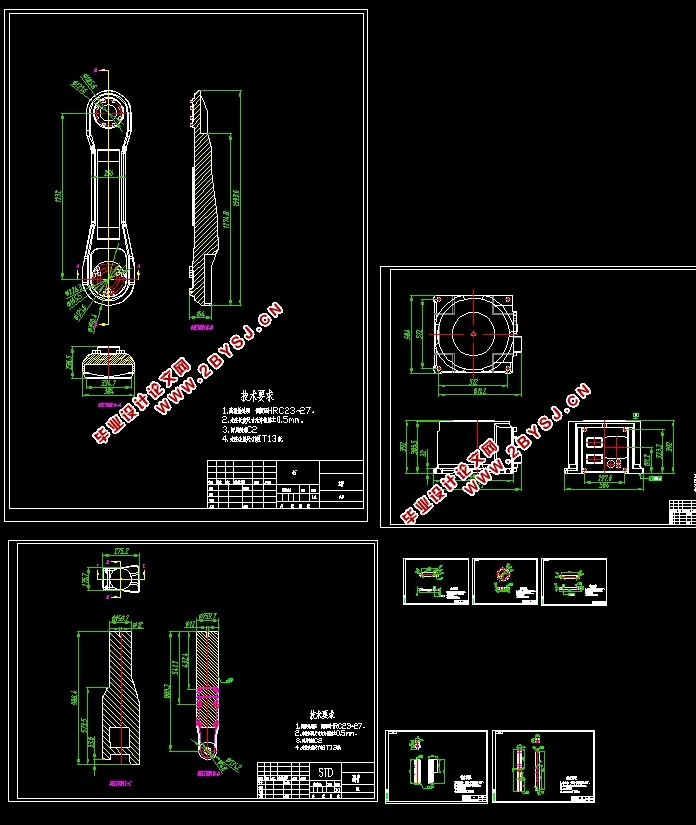
1、大电机线圈包带头的运动机构连杆断面设计方式 10
2、整体机械爪架强度的计算 11
3、连杆变形度计算 14
四,爪杆的设计方法: 15
1 爪杆旋转装置 15
2爪杆的设计 16
3、爪杆中央断面设计 16
五,齿条的升降旋转机构的设计: 18
1 齿条的升降旋转机构 18
2、最大歪斜侧向力 18
3,爪杆中央断面合成应力: 19
4 轴的设计计算 19
1 齿轮轴的设计计算 19
2 .轴的结构设计 20
3 轴的强度计算 20
4 主动齿轮轴的设计计算 21
六、电动机的选择 22
七、气压缸的设计计算 23
7.1计算工作循环中的最大载荷 23
7.2 确定气压缸参数 26
1 确定管道直径 28
2气压油的选择 29
3 气压缸壁厚、外径及工作行程的计算 29
八、大电机线圈包带头的运动机构的组装要求及操作方式 30
1、大电机线圈包带头的运动机构的安装注意事项 30
2,大电机线圈包带头的运动机构的试验要求 30
致谢 30
参考文献 31