
基于arduino的分拣小车设计(含SolidWorks三维图,程序)
无需注册登录,支付后按照提示操作即可获取该资料.
基于arduino的分拣小车设计(含SolidWorks三维图,程序)(论文说明书12600字,外文翻译,SolidWorks三维图,视频,程序)
摘 要
本论文主要介绍基于Arduino 平台设计的能够用于小型物流分拣运输且可以和手机设备进行蓝牙通讯的小车的设计过程。在论文中先后阐述了该设计的背景和在国内外的研究状况,通过系统思路设定,经分析当前主流控制板的优缺点后决定使用Arduino UNO控制板对系统进行控制,运用Solidworks软件完成分拣小车的三维建模及各零件的装配过程。为了实现分拣小车的预期功能,选择超声波传感器作为距离判断的元件,通过L298N电机驱动模块控制小车的转向和转速,依据电阻电桥的特性且结合HX711 A/D转换芯片完成电子秤的设计,对分拣小车上承载物件的信息通过LCD12864显示屏呈现。此外根据Arduino平台和 Android平台耦合性强的特性,选用蓝牙模块实现Android手机设备和搭载Arduino控制板的分拣小车之间的通信。完成电路连接后初步编写程序流程框图后用IDE实现对分拣小车的软件控制,经过程序编译、上传,利用IDE串口监视器的便利性和分拣小车的实物模型完成整体程序的调试后,本论文设计的分拣小车能够实现自动搬运、称重、显示、寻轨迹等预期功能。
关键词:分拣;Arduino;蓝牙通信;循迹
ABSTRACT
This dissertation mainly introduces the design process of a car designed based on the Arduino platform that can be used for small-scale logistics sorting and transportation and can communicate with mobile devices via Bluetooth. In the thesis, the background of the design and the research status at home and abroad were explained successively. After the analysis of the current advantages and disadvantages of the mainstream control, the design of the system was controlled using the Arduino UNO control board and the sorting was performed using Solidworks software. The three-dimensional modeling of the car and the assembly process of each part. In order to achieve the desired function of sorting trolleys, ultrasonic sensors are selected as distance-determining components. The L298N motor drive module is used to control the steering and rotation speed of the car, and the electronic scale is designed based on the characteristics of the resistance bridge and combined with the HX711 A/D conversion chip. The information on the carrying objects on the sorting cart is presented through the LCD12864 display. In addition, according to the strong coupling between the Arduino platform and the Android platform, the Bluetooth module is used to implement communication between the Android mobile device and the sorting cart equipped with the Arduino control panel. After the circuit connection is completed, the program flow diagram is preliminarily written to use the IDE to implement software control of the sorting cart. After the program is compiled and uploaded, the convenience of the IDE serial monitor and the physical model of the sorting cart are used to complete debugging of the entire program. The sorting cart designed by the dissertation can realize the expected functions such as automatic handling, weighing, display, and tracking.
Keywords: Sorting; Arduino; Bluetooth communication; tracking
系统思路设计
本设计题目为基于Arduino的分拣小车设计,目的在于通过蓝牙通串口方式连接Arduino和Android两平台之间的通信。操作者只需将手机和小车上的蓝牙接通,即可在Android手机上操控小车。每一个物流集散地都对应着一个数字,例如小型物件的目的地为北京,而在系统程序中北京对应的串口数字为2,操作者将物件放至小车上并在手机上按下“2”后,小车会自动称重,在LCD屏幕上显示出物件的重量和运输的费用及所要到达的集散地。称重结束后小车会自动按照运输路径将物件送至对应货箱中,再原路返回。在运输过程中可能会遇上其他小车或着障碍物出现在前方,这时小车需停止运输直至前方检测不到障碍物,这就是系统设计中一套完整的运输过程和小车运行状态

目 录
摘 要 I
ABSTRACT II
1 绪论 1
1.1设计研究的背景及意义 1
1.2国内外发展状况 1
2 系统整体设计 4
2.1系统思路设计 4
2.2控制芯片的选择 4
2.3 Arduino相关介绍及型号选择 5
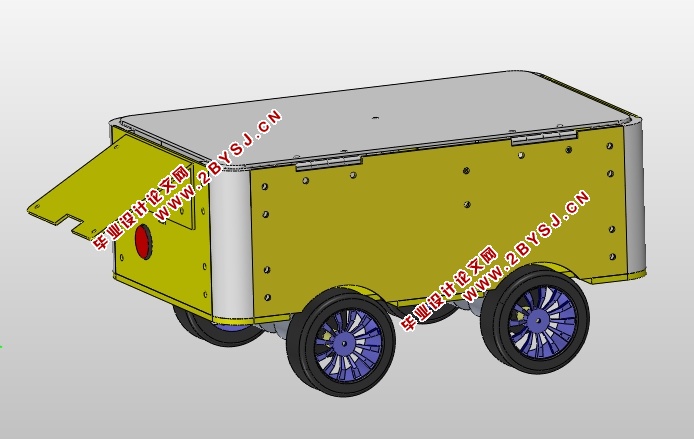
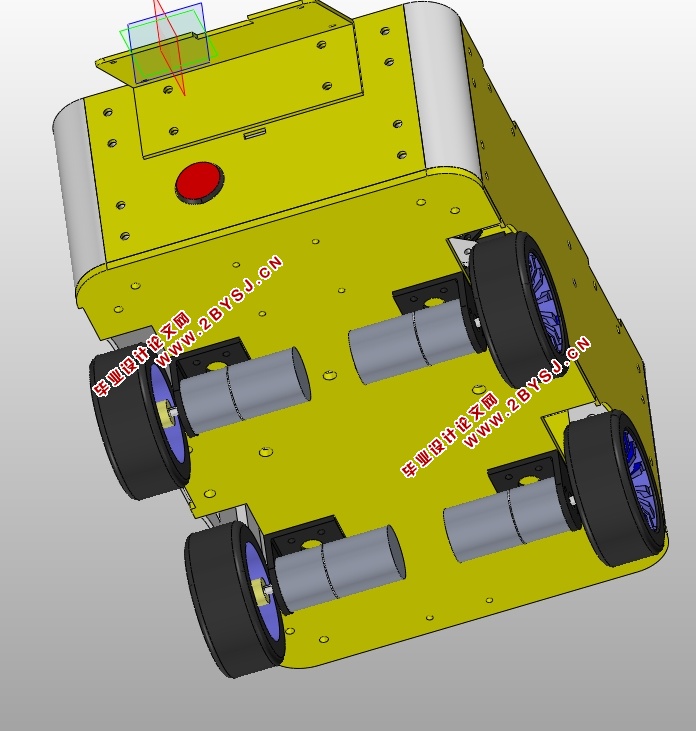
2.4分拣小车的三维建模 6
3 小车硬件介绍 10
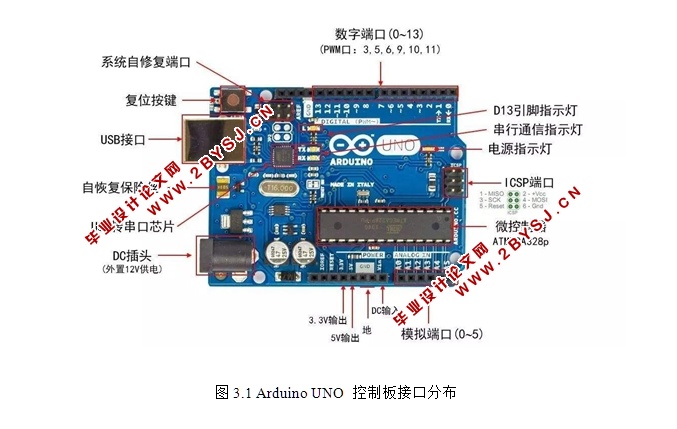
3.1 Arduino UNO 10
3.2超声波模块 11
3.3电机驱动模块(L293N) 12
3.4 5KG压力传感器和HX711模块 13
3.5 LCD 12864显示屏 17
3.6 蓝牙模块 19
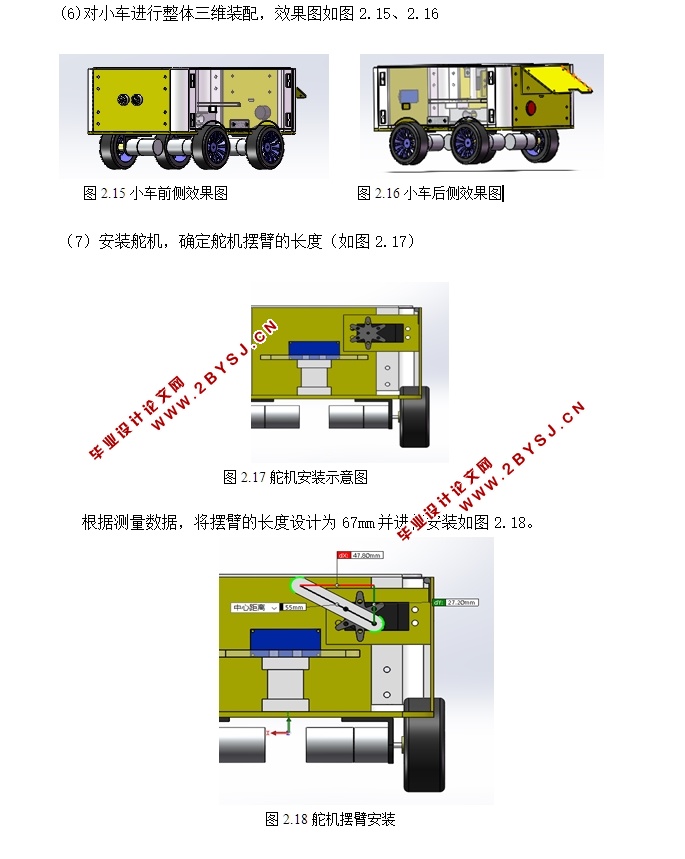
3.7摆臂舵机 20
4 分拣小车程序编写 21
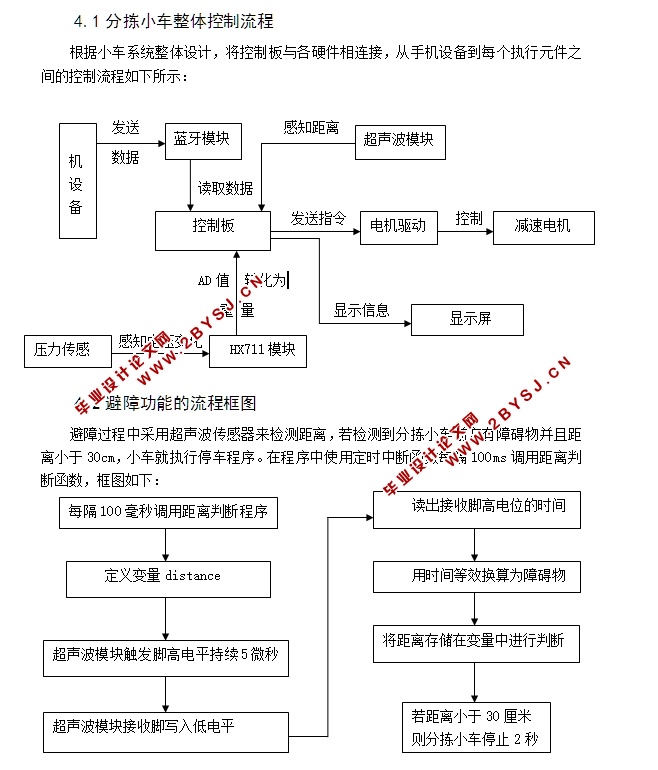
4.1分拣小车整体控制流程 21
4.2避障功能的流程框图 21
4.3循迹功能的流程框图 22
4.4称重功能的流程框图 23
4.5 LCD屏显示功能的流程框图 24
4.6蓝牙通信功能的流程框图 25
4.7舵机摆臂功能的流程框图 25
5 系统调试 26
5.1串口监视器使用 26
5.2 蓝牙模块AT设置 26
5.3调试中遇到的问题 27
6 总结 28
参考文献 29
致 谢 30
附录1:外文译文 31
附录2:外文原文 36
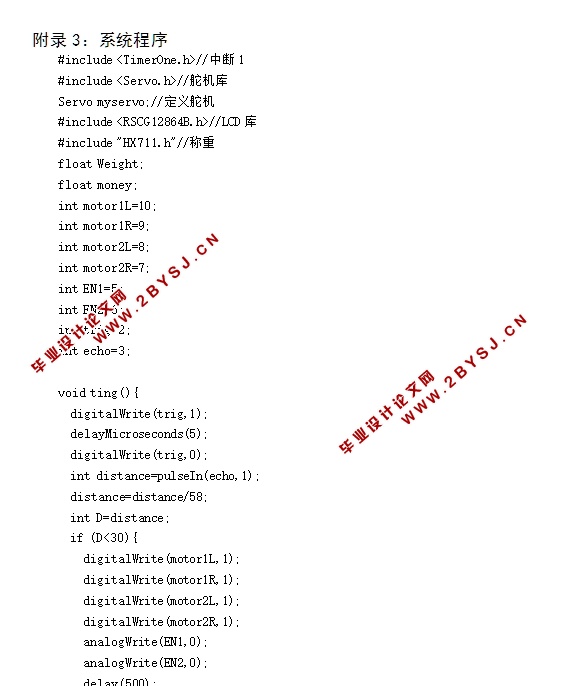
附录3:系统程序 41