
无人机组群巡检灭火系统设计(含CAD零件装配图,SolidWorks三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
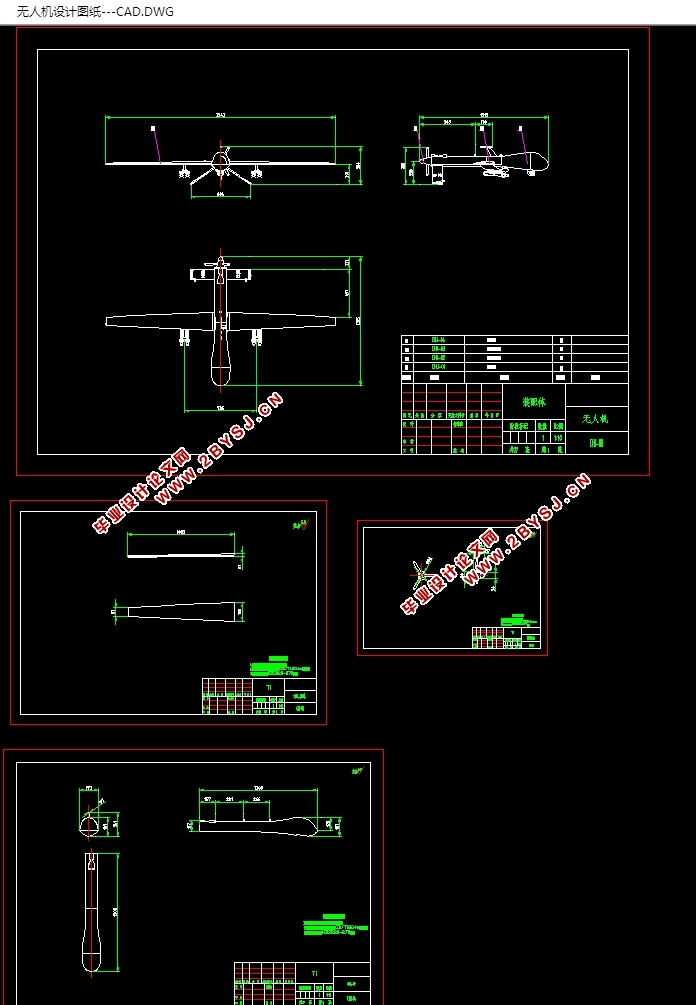
无人机组群巡检灭火系统设计(含CAD零件装配图,SolidWorks三维图)(论文说明书13000字,CAD图纸4张,SolidWorks三维图)
摘 要
随着无人机执行任务的环境日益复杂,任务类型日益多样,无人机己经开始从单架次独立任务的方式向着多架次、多类型的机群作战方向发展。通过对多无人机协同任务分配的研究,可以使系统完成的任务类型更为多样,同时任务完成的质量和效率也获得较大程度的提高。
本文研究了集中式多类型无人机编队任务分配方法。集中式指的是任务分配过程中,无人机处于从属地位,不具有自主能力,完全受控制站中人的控制。多类型指的是无人机类型和执行能力的不同。
本文首先介绍了无人机的应用现状,讨论了几种任务分配算法,分析了他们的优缺点。其次,在静态环境下基于平面网格坐标系,建立了一个多无人机任务分配数学模型,设计了一种有人参与的静态分配算法。然后利用了一个无人机森林灭火的实例,通过MATLAB仿真和分析说明了算法的可行性和实用性。最后,在动态环境中,根据无人机状态改变和任务改变两种情况,对动态任务进行了动态重分配。
关键字:无人机;任务分配;静态分配;动态重分配
Abstract
With the increasingly complex environment, the missions of the UAV grow variously. The operational manner of UAV changes from the independence towards the multi-way, more types of UAV. through the research of the assignation of the multi-type UAV, you can make the types of completed tasks more diversely and the quality and efficiency improved greatly.
This paper addresses the problem of task allocation in the centralized and multi-type UAV fleets. Centralized refers to in the task allocation process, UAV is in a
subordinate position, UAV do not have independent ability, completely under control
of human in control base. Multi-type UAV refers to the different abilities of UAV.
First of all, this paper introduces the present situation of the applications of UAV,
discussed some kinds of task allocation algorithms and analyzed their advantages and
disadvantages. What's more, in a static environment, based on the planar grid coordinate system, we set up a multi-UAV task allocation mathematical model and designed a Static allocation algorithm with humans attended. Then use an example of forest outfire to Show the feasibility and practicability of the algorithm by the simulation analysis of Matlab. Finally, according to two situations: UAV changed or tasks changed, the task allocation changes to dynamic redistribution, in dynamic environment.
Keywords: UAV ;Task allocation ;Static allocation ;Dynamic redistribution
目 录
第一章 绪论 1
1.1任务分配的研究背景 2
1.2国内外无人机应用现状 2
1.2.1应用在军事上 2
1.2.2应用在自然灾害的防护上 3
1.3论文的主要内容 4
第二章 无人机任务分配问题研究现状及发展趋势 4
2.1无人机任务分配问题的定义及解决步骤 4
2.1.1 UAV任务分配问题的定义 5
2.1.2 UAV任务分配问题的描述 5
2.1.3解决UAV任务分配问题的步骤 5
2.2无人机任务分配控制方法 5
2.2.1集中式控制 5
2.2.2分布式控制 6
2.3无人机任务分配模型分类 7
2.3.1多旅行商问题模型 7
2.3.2通用分配问题模型 8
2.3.3车辆路径问题模型 8
2.3.4混合整数线性规划模型 9
2.3.5 CMTAP通用模型 9
2.4静态任务分配算法 10
2.4.1群算法 10
2.4.2市场类算法 11
2.4.3进化理论算法 11
2.5动态环境中多任务重分配算法 11
2.5.1合同网算法 11
2.5.2拍卖算法 12
2.5.3聚类算法 12
第三章 静态环境下无人机任务分配 12
3.1任务分配场景和限制条件 13
3.1.1任务分配的场景 14
3.1.2任务分配限制条件 14
3.2多无人机任务分配的数学模型 14
3.2.1无人机任务集描述 15
3.2.2平面网格坐标系 16
第四章 动态环境下无人机任务分配 17
4.1动态任务重分配 18
4.1.1动态任务重分配的触发条件 18
4.1.2任务动态再分配采用的策略 19
4.1.3任务重分配的流程 21
结 论 23
参考文献 24
致 谢 25