
机器人上下料复合夹具体总体设计(含CAD零件装配图,SolidWorks三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
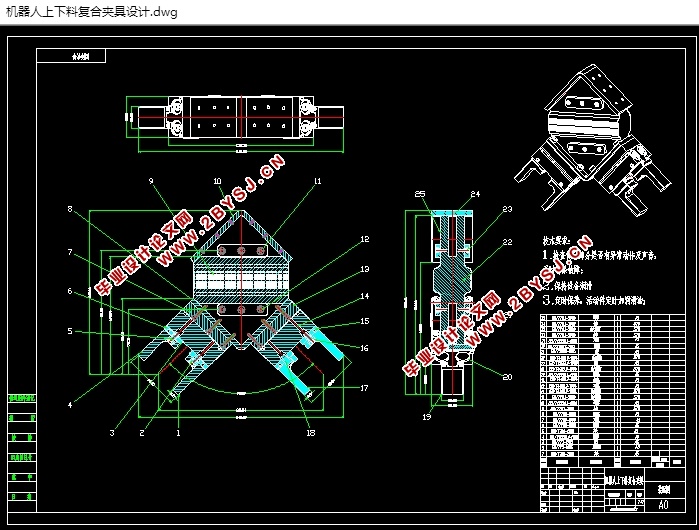
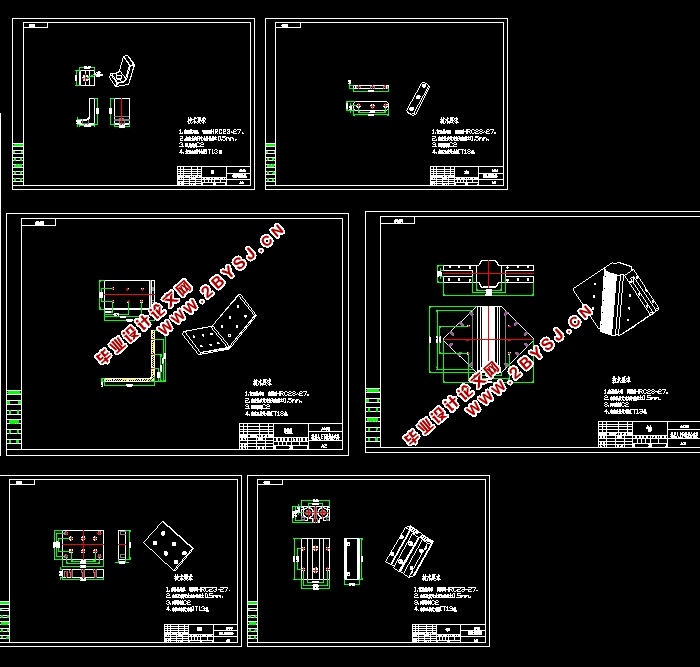
机器人上下料复合夹具体总体设计(含CAD零件装配图,SolidWorks三维图)(任务书,开题报告,论文说明书9100字,CAD图纸7张,SolidWorks三维图,x_t通用三维图,答辩PPT)
本毕业设计是一个机器人上下料复合夹具与夹持装置综合设计的设计。首先,机器人上下料复合夹具与夹持装置综合设计作了简单的概述;接着分析和机器人上下料复合夹具与夹持装置综合设计计算方法的选择原则;然后根据这些设计准则与计算基础的设计;然后检查连杆装置的主要部件的选择。普通型机器人上下料复合夹具与夹持装置综合设计由六个主要部件组成:目前,机器人上下料复合夹具与夹持装置综合设计向长距离,高速度,低摩擦的方向发展,近年来,机器人上下料复合夹具与夹持装置综合设计就是其中的一个。在设计中,该机器人上下料复合夹具与夹持装置综合设计的研制与应用,目前我国与国外先进水平相比仍有较大差距,在过程中的国内设计和机器人上下料复合夹具与夹持装置综合设计的制造中存在着许多问题。
机器人上下料复合夹具与夹持装置综合设计设计代表了设计的一般过程,对今后的设计工作的选择有一定的参考价值。
关键词:机器人上下料复合夹具与夹持装置综合设计 夹持装置 气动
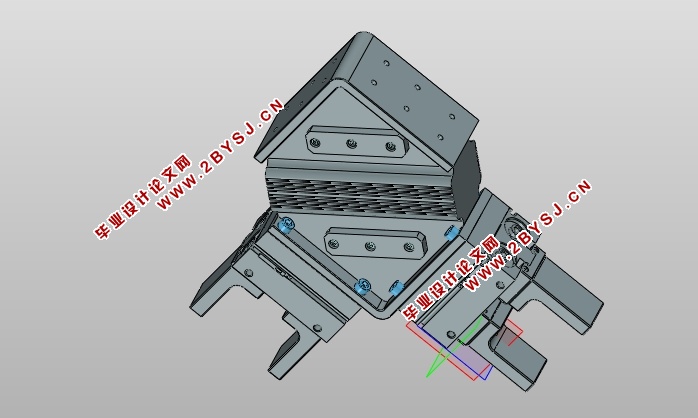
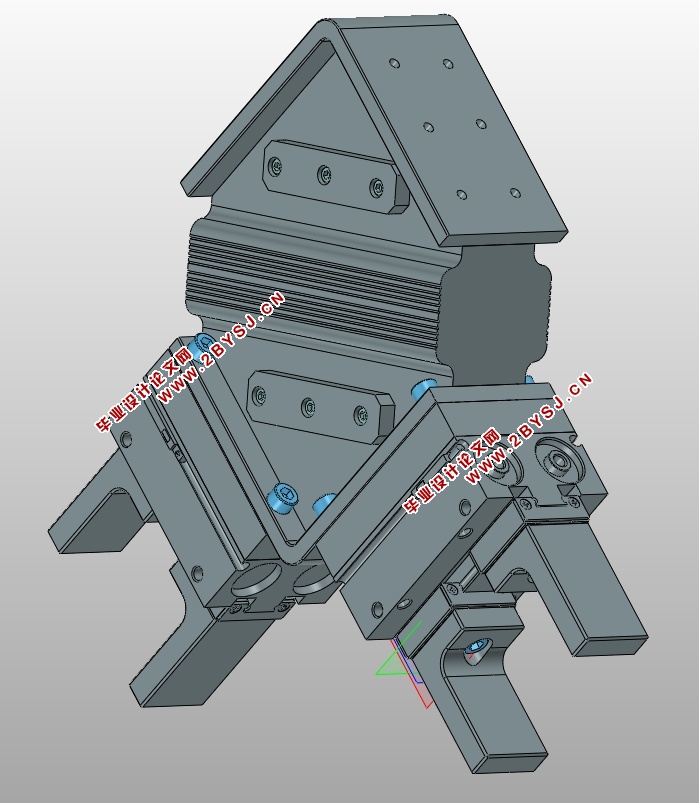
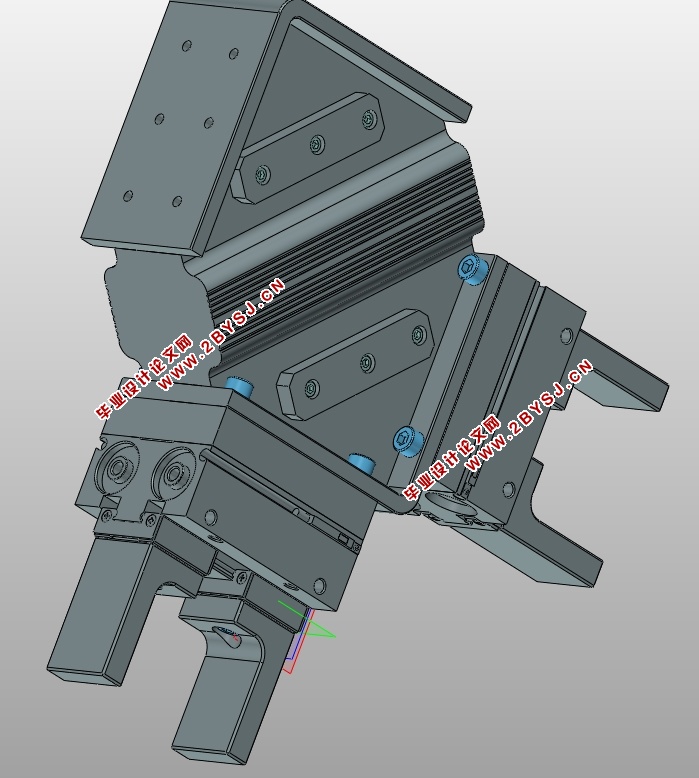
当前工业机器人上下料,搬运,码垛等通用项目都需要复合夹具,机器人
的复合夹具是机器人夹具发展的一个方向。
本项目的复合夹具与YAMAH YK400XG工业机器人相配合 ,重15kg,臂长
250mm~400mm ,最大搬运重量3kg;视作正方体工件 4cm×4cm,重1.5kg
目 录
摘要 2
一、 绪论 5
1. 国外研究现状 5
2. 国内研究现状 5
二、 机器人上下料复合夹具材料介绍及选择 6
三、机器人上下料复合夹具主要零部件设计计算 8
1、机器人上下料复合夹具支架断面设计方式 8
2、整体夹具强度的计算 9
3、支架变形度计算 10
四,气缸的设计方法: 12
1 气缸旋转装置 12
2气缸的设计 13
3、气缸中央断面设计 14
五,夹具架的旋转机构的设计: 15
1、最大歪斜侧向力 15
2,气缸中央断面合成应力: 15
六、机器人上下料复合夹具装配图 16
七、气动缸的设计计算 16
7.1计算工作循环中的最大载荷 16
7.2 确定气动缸参数 19
7.3 轴的设计计算 21
1 齿轮轴的设计计算 21
2 .轴的结构设计 22
3 轴的强度计算 23
4 主动齿轮轴的设计计算 23
7.4 夹持结构及设计 24
7.5 、设计及参数选择 27
8、机器人上下料复合夹具的组装要求及操作方式 29
1、机器人上下料复合夹具的安装注意事项 29
2,机器人上下料复合夹具的试验要求 29
总结 30
致谢 31
参考文献 32