
水下清洗机器人作业装置研究的设计(含CAD零件装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
水下清洗机器人作业装置研究的设计(含CAD零件装配图)(任务书,外文翻译,设计说明书10300字,CAD图7张)
1设计任务
(1)设计要求: 刷盘的转速为200r/min;
(2)搜集国内外资料,确定水下清刷装置的总体方案;
(3)水下清刷装置的设计计算和分析;
(4)总装图及零件图的设计;
水下清刷装置的机理
2.1船体表面维护的处理流程
水下船体表面维护是一项复杂的系统工程,整个处理过程包括去污,除锈,涂漆。水下清刷装置主要是进行整个处理过程的前端处理程序,其作用是通过电机带动刷盘旋转除去船体表面的污物,以及为后续处理做准备。因此,水下清刷装置的清刷效果的好坏直接决定了水下船体表面维护的效果。目前,水下清刷装置主要采取刷盘式清刷装置,近年来,该项技术取得了长足的发展。
2.2 水下清刷装置的工作原理
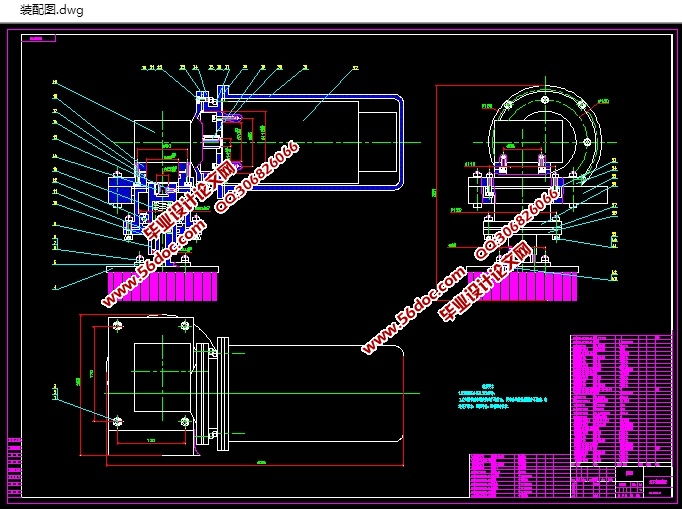
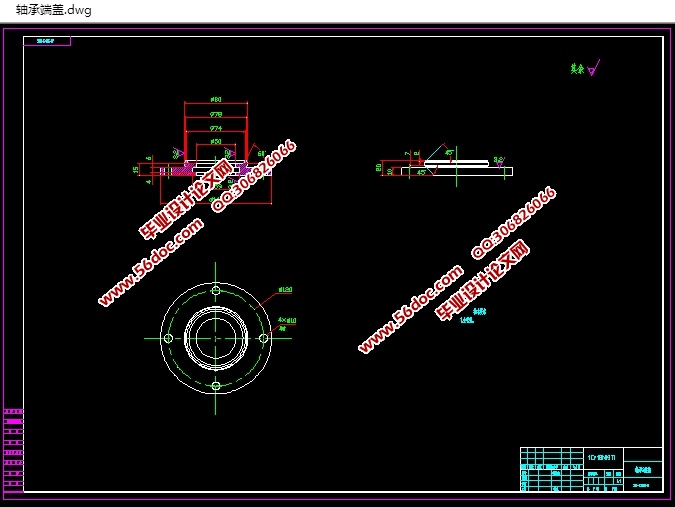
水下清刷装置是一种低速装置,其转速为200r/min,主要由刚丝刷、滑杆、内套筒、外套筒、轴承、轴承端盖、减速器、电机、密封罩、法兰盘、弹簧等组成。
水下清刷装置工作时,由电机通过减速器、内套筒带动钢丝刷旋转。该装置安装在水下清刷机器人上,通过钢丝刷的旋转运动和水下机器人的移动来完成水下船体表面的清洗工作。

目次
1 绪论…………………………………………………………………………………1
1.1 研究的背景目的和意义…………………………………………………………1
1.1.1 研究的背景……………………………………………………………………1
1.1.2 研究的目的…………………………………………………………………1
1.1.3 研究意义………………………………………………………………………3
1.2 国内外发展现状…………………………………………………………………3
1.3设计的任务和方案………………………………………………………………5
1.3.1 设计任务………………………………………………………………………5
1.3.2 设计方案………………………………………………………………………5
2 水下清刷装置的机理………………………………………………………………9
2.1船体表面维护处理流程………………………………………………………9
2.2水下清刷装置的工作原理…………………………………………………9
2.3柔性刷的作用…………………………………………………………………10
2.4本章小结………………………………………………………………………11
3 主要部件参数的设计……………………………………………………………12
3.1设计原则 ………………………………………………………………………12
3.2设计要求………………………………………………………12
3.3清刷工具的动力学分析及刷盘半径的确定…………………………………12
3.3.1清刷工具的动力学分析 ……………………………………………………12
3.3.2 钢丝刷半径的确定………………………………………………………17
3.4 电机及减速器的选择…………………………………………………………17
3.4.1 电机的选择………………………………………………………17
3.4.2 减速器的选择………………………………………………………17
3.5 钢丝刷技术参数的确定………………………………………………………18
3.6 弹簧技术参数的确定………………………………………………………19
3.7轴承的选择与校核 ……………………………………………………………20
3.8 本章小结………………………………………………………21
4 总结………………………………………………………………………22
致谢………………………………………………………………………23
参考文献……………………………………………………………………………24