
自动墙壁清洗机(爬壁机械器人)的设计(含CAD图,Creo,PROE三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
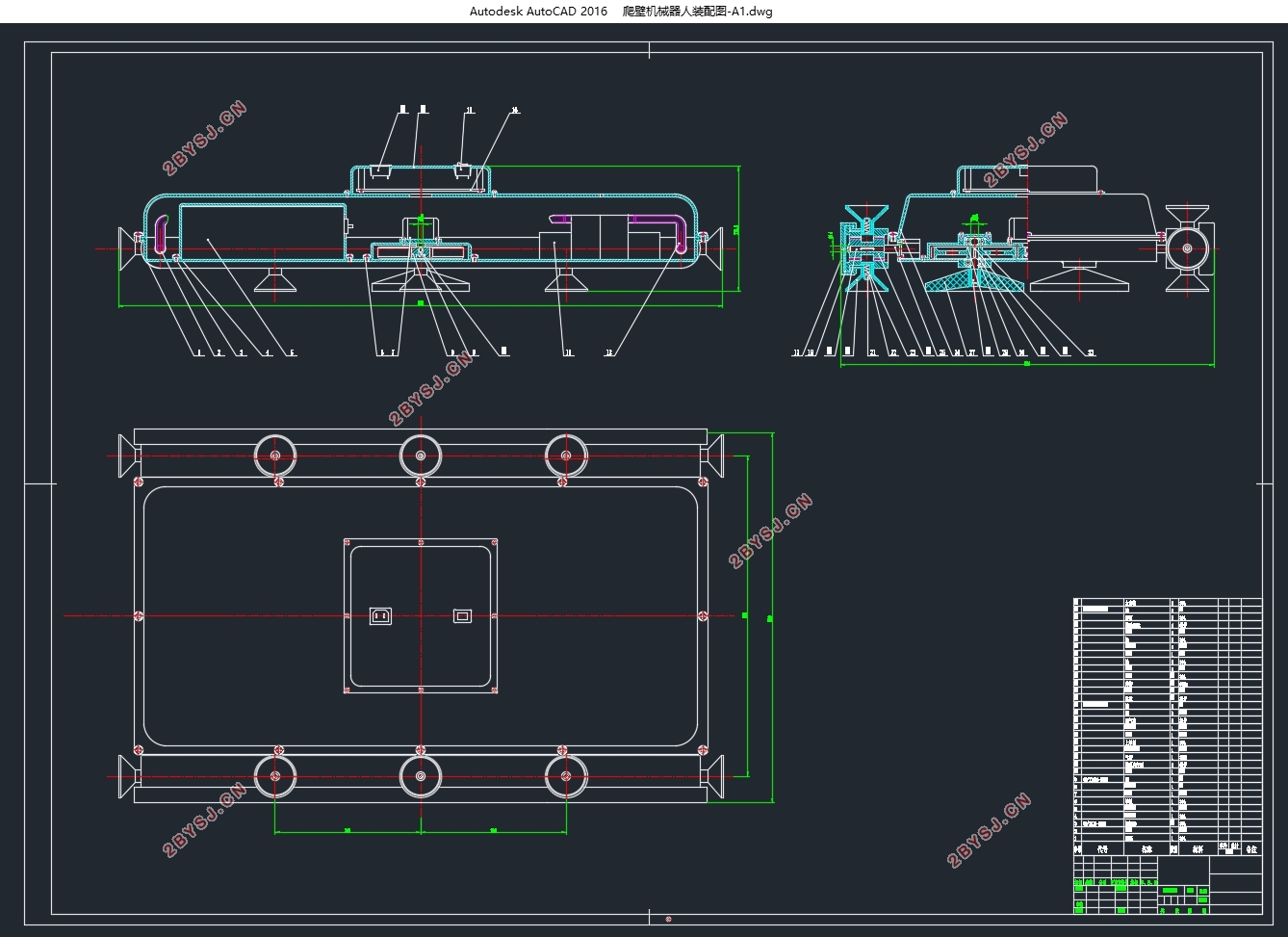
自动墙壁清洗机(爬壁机械器人)的设计(含CAD图,Creo,PROE三维图)(论文说明书11000字,CAD图7张,Creo三维图,PROE三维图)
自动墙壁清洗机是一种能够在垂直墙壁上进行自主作业的工作机械,机器研究强国之一的日本在这方面对行业发展做出了很大的贡献。
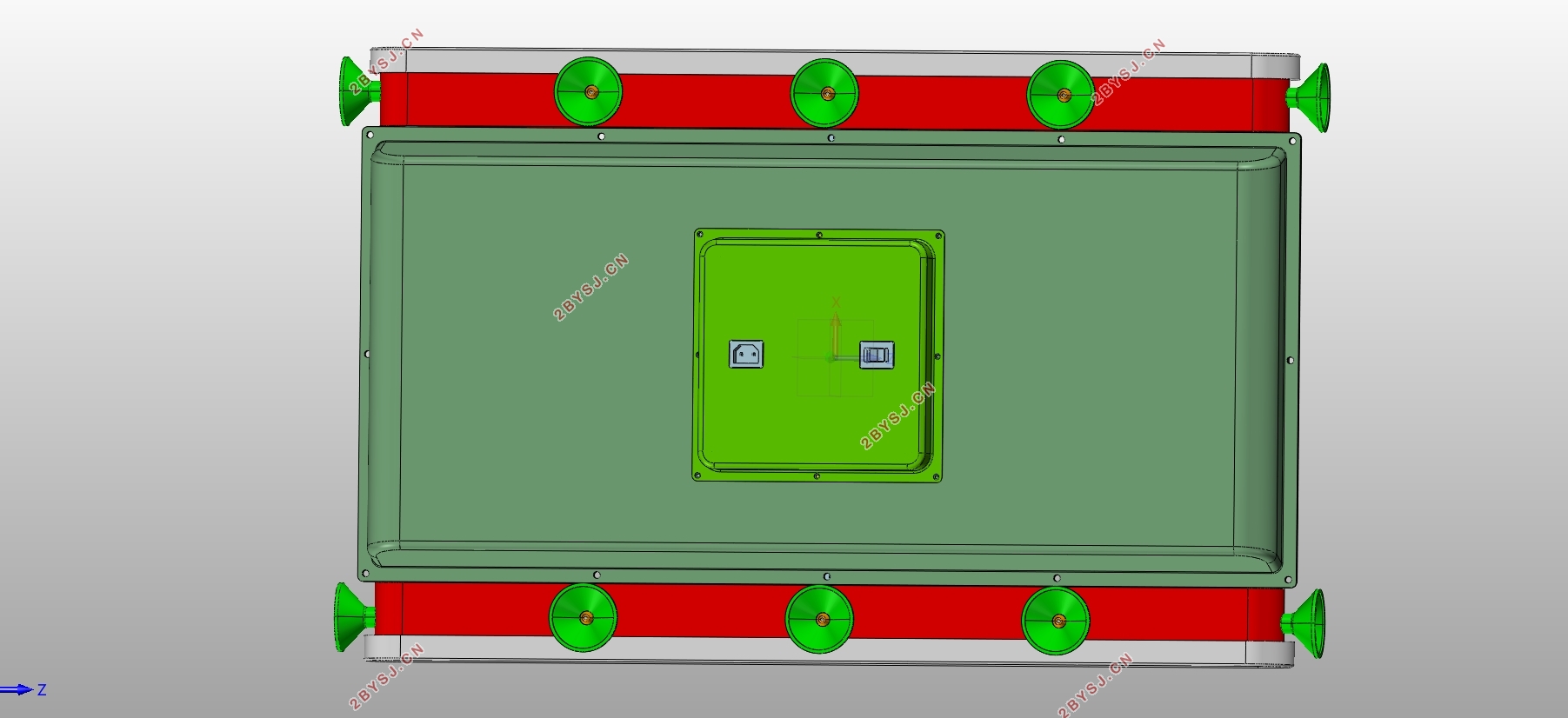
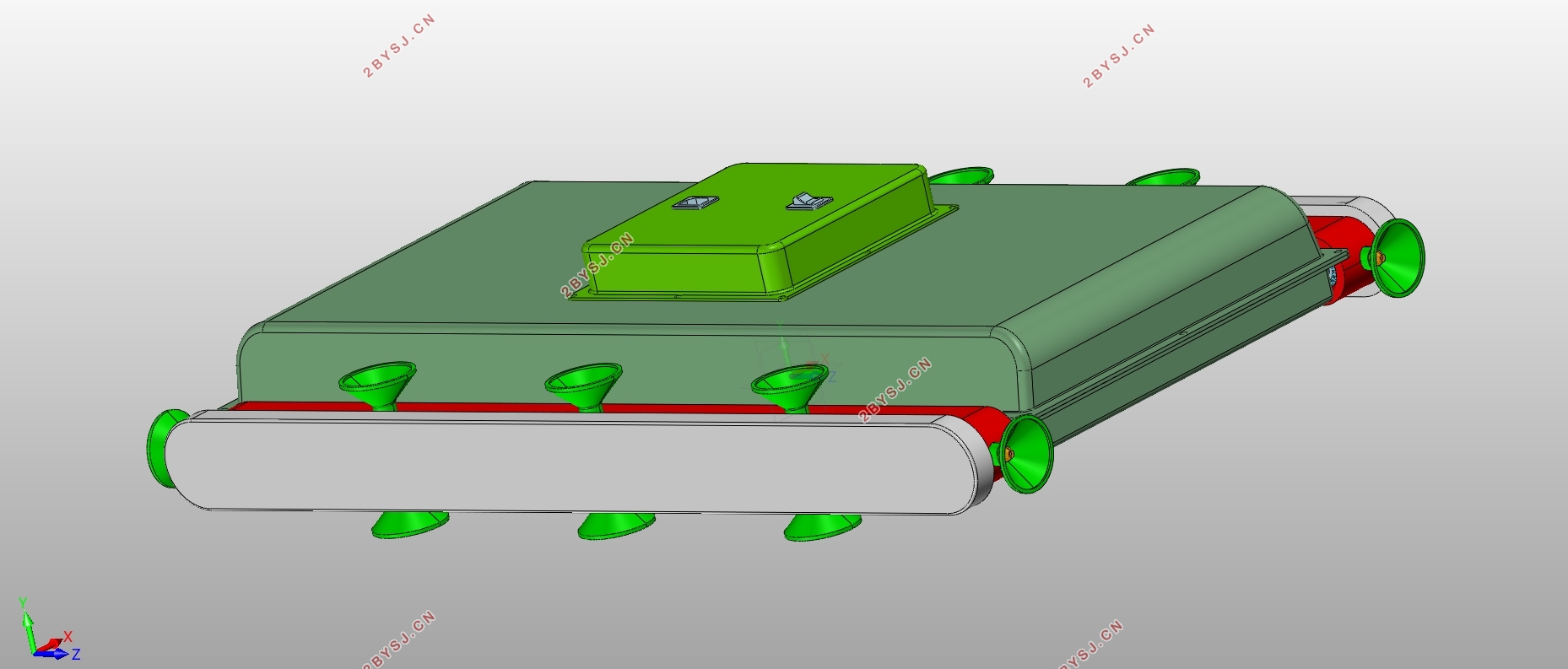
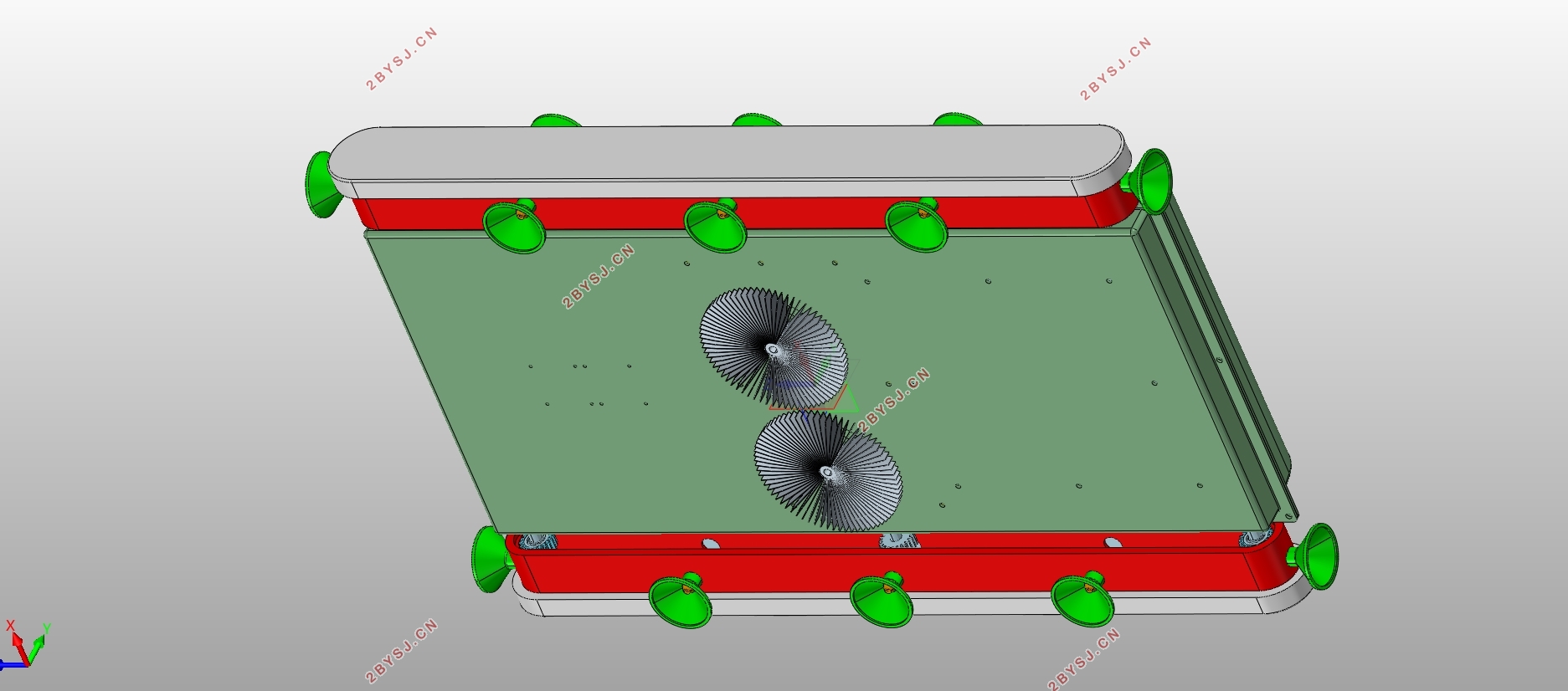
自动墙壁清洗机主要由移动部分、吸附部分和清洗部分组成。此机械设备具有一定的吸附能力,这样可以防止机械在工作中坠落。同时机械内部还有移动机构,可以让机械在墙壁上不断的移动。机械的清洁部分通过电机控制,可以让清洗机在墙壁上移动时就能够完成清洁工作。
本文设计的自动墙壁清洗机具有如下功能:移动和吸附能力、避障和越障能力、完成清洗工作的能力。
采取履带实现移动能力,采取真空吸附技术实现墙壁吸附能力。
清洁机构是与清洗机配合用于自动墙壁清洗机的附件,实现对墙壁的清洗。
本文设计的自动墙壁清洗机结构简单,操作方便,适合未来发展方向,有很大的市场前景。
关键词:真空吸附 清洗 墙壁 避障
目 录
摘 要 I
ABSTRACT I
目 录 II
第一章 绪 论 1
1.1引言 1
1.2国内外研究现状 1
第二章 自动墙壁清洗机原理方案 4
2.1 履带式磁吸附爬壁 4
2.2 车轮式磁吸附爬壁 4
2.3 履带式吸盘吸附爬壁 4
2.4 原理方式比较 4
2.5履带式吸盘吸附爬壁机器人各部分方案拟定 5
2.5.1 吸盘吸附爬壁机器人功能要求 5
2.5.2 清扫履带结构的方案拟定 5
2.5.3 爬行机构的方案拟定 6
2.5.4 清洗机行走机构方案 7
2.5.5 清洗机清洗机构的设计 7
第三章 传动及动力设计与计算 8
3.1 吸盘设计 8
3.2 吸盘机构设计 13
3.3 清洗机构齿轮传动设计 14
第四章 结构设计 19
4.1 行车主体设计 19
4.2 清扫刷设计 20
4.3 履带结构设计 20
4.4 配气盘结构设计 23
第五章 三维建模与虚拟装配 25
5.1 零件建模 25
5.1.1车体底座建模 26
5.1.2履带建模 27
5.1.3配气盘建模 28
5.1.4 轮轴建模 28
5.1.5 齿轮箱盖建模 29
5.1.5 齿轮建模 30
5.2 虚拟装配 30
结 论 32
参考文献 33
致谢 35