
基于MATLAB动态矩阵控制系统仿真研究(附程序)
无需注册登录,支付后按照提示操作即可获取该资料.
基于MATLAB动态矩阵控制系统仿真研究(附程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文19000字,程序,答辩PPT)
摘 要
模型预测控制(Model predictive Control(MPC))是直接从工业过程控制中产生的一类基于模型预测、滚动优化并结合反馈校正的先进计算机优化控制算法。由于模型在工业现场易于获得,不需要复杂的系统辨识与建模,采用反馈校正基础上的在线滚动优化取代传统的最优控制,所以它对模型的要求低,对模型失配、非最小相位系统、不确定干扰的影响具有较强的鲁棒性,而且在线计算相对比较简单,适用于数字计算机控制。其基本思想是将传统自校正技术的单步预测扩展为多步预测,从而有效地抑制了算法对于模型参数变化的灵敏性。它的典型算法有三大类:模型算法控制(Model Algorithmic Control(MAC))、动态矩阵控制(Dynamic Matrix Control(DMC))、广义预测控制(Generalized Predictive Control (GPC))。它们都基于模型预测、滚动优化、反馈校正三大环节。
本课题研究动态矩阵控制的参数对其鲁棒性的影响,在matlab中利用DMC对二阶系统实现控制仿真。文中首先概述了预测控制的产生、发展以及研究近况。介绍了时滞对象的主要控制方法。之后详细阐述了动态矩阵控制的原理。最后针对二阶系统,在MATLAB中进行了PID、大林算法、动态矩阵算法的仿真,并进行了分析、比较。实验结果表明动态矩阵控制具有易于建模、鲁棒性强的显著优点。
关键词:模型预测控制;动态矩阵控制;鲁棒性;二阶系统
Abstract
Model predictive control (Model predictive Control (MPC)) is based on model prediction, rolling optimization and feedback correction is combined with advanced computer optimization control algorithm for a class of generated directly from industrial process control. Because the model is easy to obtain in the indust. Because the model is easy to obtain in the industrial field, does not require the system identification and modeling of complex feedback correction, using the rolling optimization based on replacing the traditional optimal control, so the model requirement is low, the mismatch of the model, the non minimum phase systems, the impact of uncertain interference with strong robustness, and online calculation relatively simple, suitable for digital computer control. The basic idea is to single step prediction of traditional self-tuning technology is extended to a multi step prediction, thus effectively suppressed the algorithm for the sensitivity of the model parameters. The typical algorithm which has three categories: model algorithm control (Model Algorithmic Control (MAC)), the dynamic matrix control (Dynamic Matrix Control (DMC)), generalized predictive control (Generalized Predictive Control (GPC)). They all based on model prediction, rolling optimization, feedback correction of three links.
Influence of the parameter design of the dynamic matrix control the design of its robustness, in Matlab using DMC to achieve two order control system simulation. In this paper, the predictive control of the generation, development and current research situation. Introduces the main control methods for time delay systems. Then elaborate the principle of dynamic matrix control. Finally, for the two order system, the simulation of PID, the Dalin algorithm, dynamic matrix algorithm in MATLAB, and analyzed, comparison. The experimental results show that the dynamic matrix control has the advantages of easy modeling, strong robustness.
Keywords:MPC;DMC;Robustness;second-order system
目 录
第1章 绪论 1
1.1 预测控制的产生发展 1
1.2 预测控制的研究近况 3
1.3 预测控制的发展前景 4
第2章 时滞对象的控制方法 6
2.1 时滞过程控制的发展与现状 6
2.2 时滞系统的控制方法 6
第3章 模型预测控制理论 10
3.1 模型预测控制概述 10
3.2 动态矩阵控制原理 13
第4章 二阶系统DMC算法仿真 25
4.1 仿真软件的简介 25
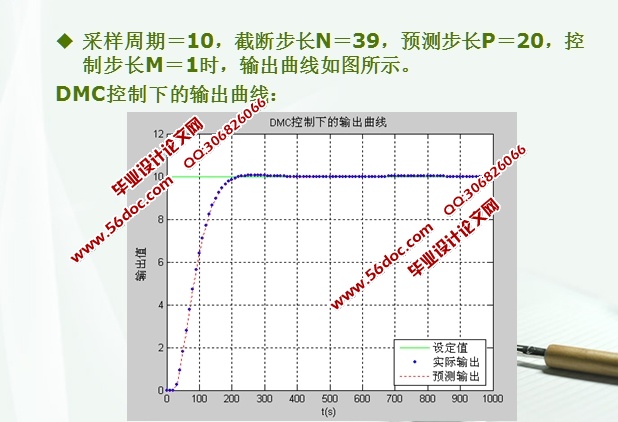
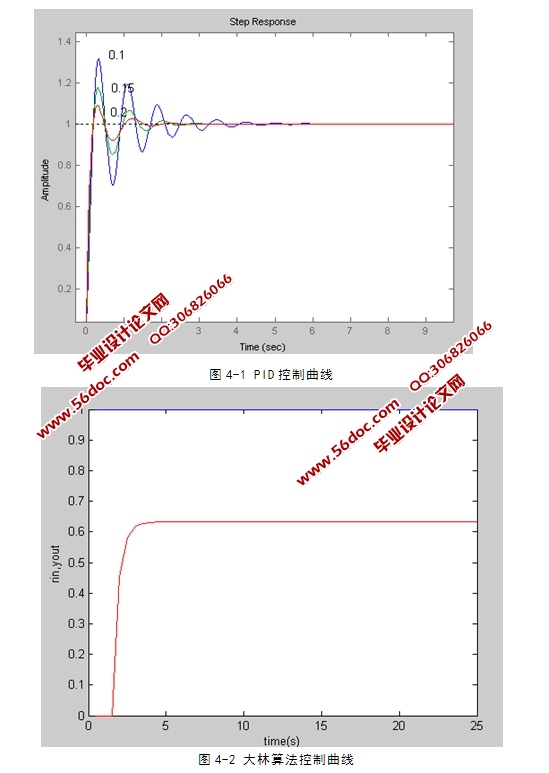
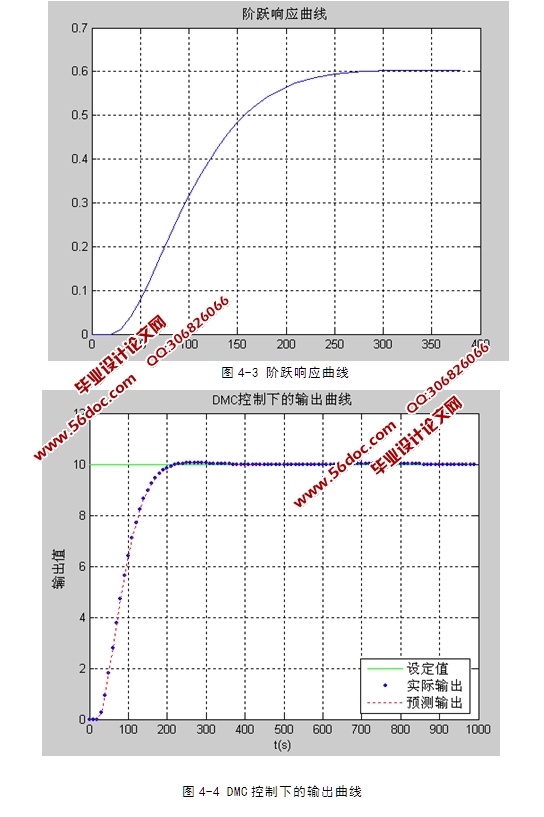
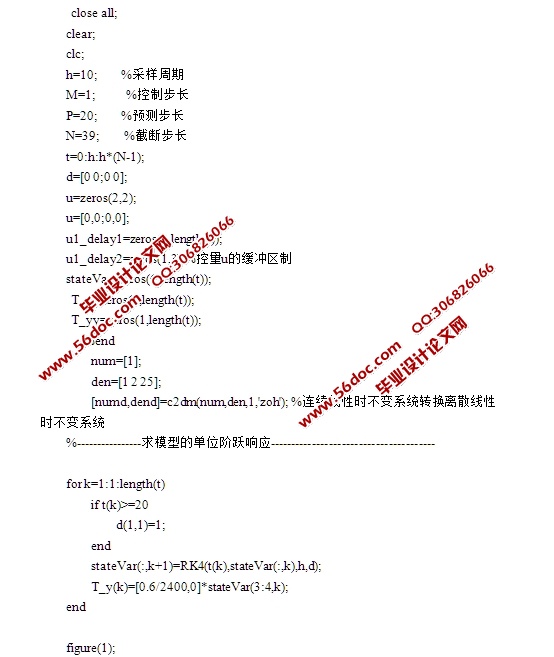
4.2 二阶系统的DMC控制仿真 27
结 论 32
参考文献 33
致 谢 34
附 录 35