
封焊机的自动上料机构设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
封焊机的自动上料机构设计(含CAD零件图装配图)(外文翻译,论文说明书12400字,CAD图6张)
摘要
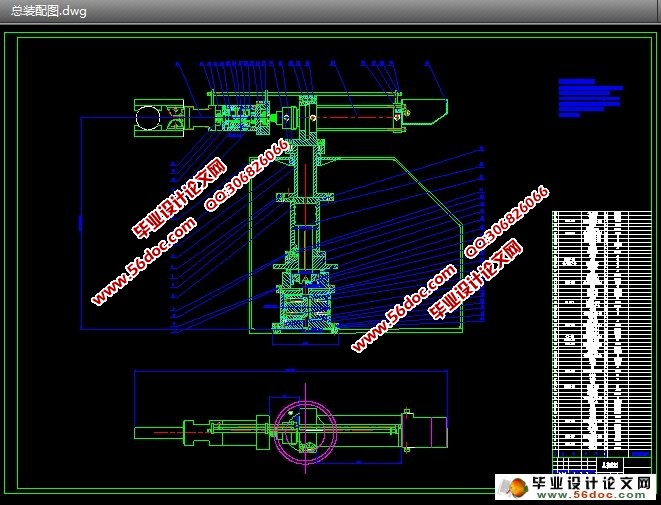
本文通过对机械手的组成和分类,及国内外的发展状况的了解,进行了总体方案设计,确定了机械手用四自由度和圆柱坐标型式。
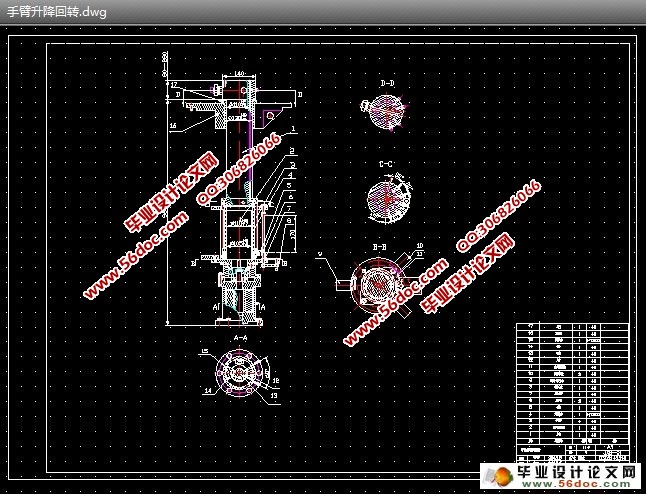
本机械手为上料机械手,为使其通用性加强,故同时设计了机械手的夹持式手部结构和吸附式手部结构,可以更换使用。计算出了手腕转动时所需的驱动力矩和回转汽缸的驱动力矩,确定了相关尺寸,设计了机械手的腕部结构;设计了机械手的手臂结结构;设计了手臂伸缩,升降用液压缓冲器和手臂回转用液压缓冲器。
关键词 上料;机械手;气缸
Seal Welding Machine Automatic Feeding Mechanism Design
Abstract
In this paper, the composition and classification of the robot, and the development of domestic and international understanding of the status, the overall design, the robot with four degrees of freedom and cylindrical coordinates type.
The robot feeding robot, to its versatility strengthen, while the design of the robot holding hands structure and adsorption hand structure, you can replace the use of. Calculate the torque required to drive the rotation of the wrist and the drive torque of the rotary cylinder, with a hydraulic buffer identified by relative size, the design of the robotic wrist structure; design of the robotic arm junction structure; design of the telescopic arm lifting The rotary arm with hydraulic shock absorber.
Keywords: feeding robot;cylinder.;manipulator
机械手的技术参数列表
一 用途:
用于封焊机的自动上料
二 设计技术参数:
1 抓重:
2 自由度数:4个自由度
3 坐标型式:圆柱坐标
4 最大工作半径:
5 手臂最大中心高:
6 手臂运动参数: 伸缩行程
伸缩速度
升降行程
升降速度
回转范围
回转速度
7 手腕运动参数: 回转范围
回转速度
8 定位方式:行程开关或可调机械挡块等
9 定位精度:
10 驱动方式:气压传动
11 控制方式:点位控制(采用PLC)


目 录
1 绪论 1
1.1 工业机械手概述 1
1.1.1 工业机器人的发展趋势 2
1.2 机械手的组成和分类 3
1.2.1机械手的组成 3
1.2.2 机械手的分类 5
2 机械手的设计方案 7
2.1机械手的坐标型式与自由度 7
2.2 机械手的手部结构方案设计 7
2.3 机械手的手腕结构方案设计 7
2.4 机械手的手臂结构方案设计 8
2.5 机械手的驱动方案设计 8
2.6 机械手的控制方案设计 8
2.7 机械手的主要参数 8
2.8.机械手的技术参数列表 9
3 手部结构设计 11
3.1夹持式手部结构 11
3.1.1手指的形状和分类 11
3.1.2设计时考虑的几个问题 11
3.1.3手部夹紧气缸的设计 12
4 手腕结构设计 16
4.1 手腕的自由度 16
4. 2手腕的驱动力矩的计算 16
4.2.1手腕转动时所需的驱动力矩 16
4.2.2回转气缸的驱动力矩计算 19
5 手臂伸缩、升降、回转气缸的尺寸设计与校核 21
5.1手臂伸缩气缸的尺寸设计与校核 21
5.1.1 手臂伸缩气缸的尺寸设计 21
5.1.2 尺寸校核 21
5.1.3.导向装置 22
5.1.4 平衡装置 22
5.2手臂升降气缸的尺寸设计与校核 22
5.2.1 尺寸设计 22
5.2.2 尺寸校核 23
5.3 手臂回转气缸的尺寸设计与校核 24
5.3.1 尺寸设计 24
5.3.2 尺寸校核 24
6 结论 26
参考文献 27
致 谢 28