
四连杆变形履带式搜救机器人设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
四连杆变形履带式搜救机器人设计(含CAD零件图装配图)(开题报告,中期检查表,外文翻译,实习报告,论文设计说明书15200字,CAD图8张)
摘 要
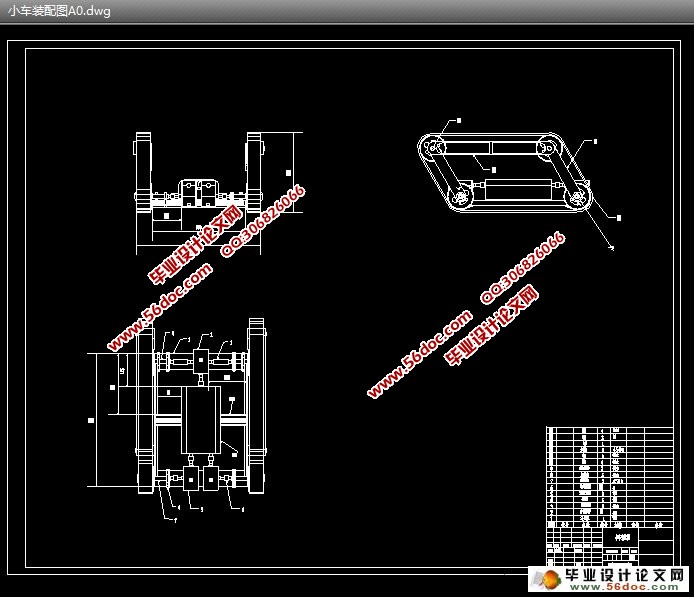
四连杆变形履带式机器人结构布局, 主要由机架和两个对称分布的履带变形模块组成。位于机器人中部的机架作为移动平台可装载直流电源及与控制相关的各种设备, 用于完成各种特定的任务, 在机器人运动过程中一般保持水平。
机架两侧是基于平行四边形结构的履带变形模块, 主要由四连杆变形机构、主驱动轮、被动轮及绕在履带轮上的履带组成, 其中四连杆变形机构由连杆、主动曲柄、被动曲柄组成, 用于提供驱动力, 并且可以绕机架旋转, 实现履带变形, 在越障时给机器人提供额外的辅助运动。机器人共有3个自由度, 即一个平动自由度和两个旋转自由度。安装在机器人两个主驱动轮内的电机通过联轴器传动, 将主驱动轮的旋转运动转变为履带的平移运动, 实现机器人的直线前进、后退和转向。另外一个电机安装在机架上, 通过链传动驱动左右两侧履带变形模块中的主动曲柄绕位于机架前方的轴转动, 从而实现四连杆机构的变形, 最终使绕在其四周的履带构形发生变化。该结构的特点在于巧妙地利用四连杆机构实现了机器人的行进与履带的变形, 使机器人具备良好的越障性能和地面适应性。
关键词:平行四边形 四连杆变形履带式机器人 越障
Abstract
Four connecting rod deformation caterpillar search and rescue robot that is used for public security, armed police after disaster unstructured environment executive search and rescue mission under the special robot.
Four connecting rod deformation caterpillar robot structure layout, and the main frame and two symmetric distribution of deformation crawler module. Located in the central robot as a mobile platform can be loaded with control dc power supply and various related equipment, used to finish all kinds of particular task, in the motion process generally keep level. On both sides of the frame is based on a parallelogram structure deformation of the crawler module, mainly by the four connecting rod deformation institutions, the drive wheels, passive round and round the track of the wheel track composition, four of them deformation mechanism of connecting rod, connecting active and passive crank crank up, used to provide a driving force,And can be rotated around the frame, realizing track deformation, the obstacle to provide additional auxiliary motion robot. The robot has 3 degrees of freedom, namely a translational degrees of freedom and two rotational degrees of freedom. Mounted on a robot two main driving wheel motor through the coupling drive, the main drive wheel rotation motion into translational motion track of the robot, straight forward, backward and steering. A motor is mounted on the frame, through the chain transmission drive around both sides of track deformation module of the driving crank around the rack is located in front of the axis of rotation, thus realizing the four connecting rod mechanism of deformation, eventually winding around the track configuration changes. The structure is characterized in that the clever use of four bar linkage mechanism can make the robot traveling and track deformation, so that the robot has good barrier properties and ground adaptability.
Key words: parallelogram Four connecting rod deformation caterpillar robot The obstacles
本文以研究和开发一种能搭载多种特殊装置的移动机器人平台为目标,提出了一种新型三自由度微小型履带机器人的设计方案。机器人采用模块化设计,可迅速拆装,适合单兵携带和进行维护,具有良好的机动性,在越障、越沟、攀爬方面具有明显优势。
该机器人作为一种稳定的移动平台,最大优点是具有良好的越障性能、环境适应性能并具备了全地形通过能力,可进一步开发成为通用平台,装载侦察设备、武器系统等实现多机器人编队,形成战斗群,提高机器人可靠性和存活率。也可以加载其他设备用于民用领域。
目 录
1 绪论 1
1.1 选题背景和意义 1
1.2 履带机器人研究现状 3
1.2.1 国外研究现状 3
1.2.2 国内研究现状 6
1.3 微小型履带机器人的关键技术 8
1.3.1 模块化设计技术 8
1.3.2 控制技术 9
1.3.3 通信技术 9
1.3.4 多传感器信息融合技术 10
1.3.5 导航和定位技术 10
1.4 履带机器人的发展趋势 11
1.4.1 多机器人编队 11
1.4.2 人工智能的使用 11
1.4.3拓展使用范围 11
1.4.4 加强实战使用 12
1.4.5 跨平台互操作能力 12
1.4.6 开发通用平台 12
1.4.7 进一步提高自主能力 13
1.5 本文主要研究内容 13
2 机器人驱动功率计算与电机选择 15
2.1 机器人整车驱动力 15
2.2 牵引电机特性参数 16
2.3 机器人驱动功率确定 17
2.4 驱动电机选择 19
3 四连杆履带式机器人内部减速器设计 20
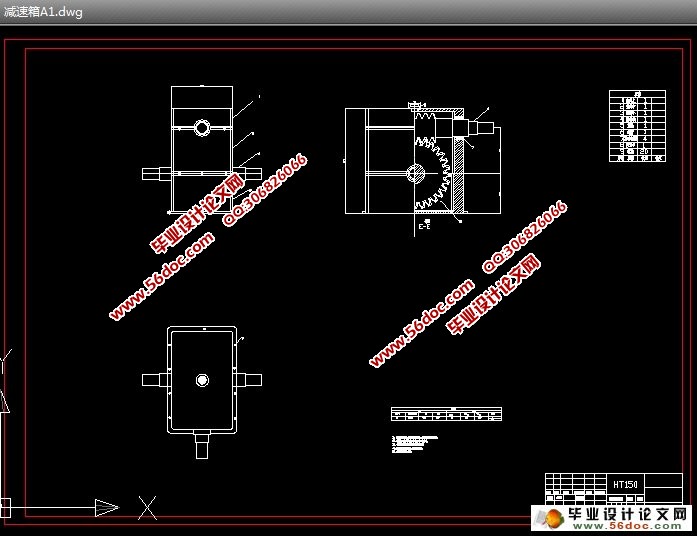
3.1 驱动轮蜗轮蜗杆减速器设计 20
3.1.1电机的选择 20
3.1.2动力学参数计算 20
3.1.3传动零件的设计计算 21
3.1.4输入轴的设计计算 24
3.1.5输出轴的设计计算 27
3.2 控制主动曲柄转到的蜗轮蜗杆减速器设计 29
3.2.1电机的选择 29
3.2.2动力学参数计算 30
3.2.3传动零件的设计计算 30
3.2.4输入轴的设计计算 33
3.2.5输出轴的设计计算 36
4 四连杆变形履带式机器人的建模 39
4.1 虚拟样机技术与Proe软件简介 39
4.2四连杆变形履带式机器人虚拟样机建模 40
4.2.1三维模型的建立 40
5总结 42
致 谢 44
参考文献 45