
重型桶装成品搬运堆垛系统机构(搬运机器人机器手)设计
无需注册登录,支付后按照提示操作即可获取该资料.
重型桶装成品搬运堆垛系统机构(搬运机器人机器手)设计(开题报告,外文翻译,中期报告,设计说明书15000字,CAD图纸7张)
摘 要
在 当今大规模制造业中,企业为提高生产效率,保障产品质量,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用 程度在一定程度上反映了一个国家工业自动化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作。
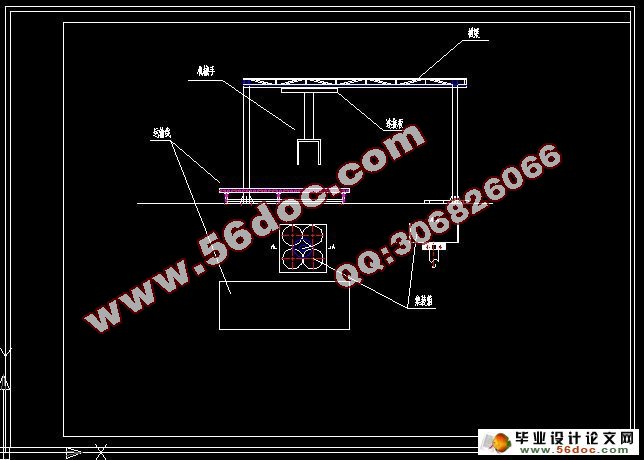
本课题 主要对搬运机器人的机械部分展开讨论,对原有的机械结构提出了新的改进方法,并把现在的新技术应用到本课题中,从而使得搬运机器人更加适用于现在的工业工 作环境。通过详细了解搬运机器人在工业上的应用现状,提出了具体的搬运机器人设计要求,并根据搬运机器人各部分的设计原则,进行了系统总体方案设计以及包 括:机器人的手部、腕部、臂部、腰部在内的机械结构设计。此搬运机器人的驱动源来自液压系统,执行元件包括:柱塞式液压缸、摆动液压缸、伸缩式液压缸等。 通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。
关键词:搬运机器人;液压系统;机械结构设计
Heavy barrelled delivery stacking system design
ABSTRACT
In the modern large-scale manufacturing industry, enterprises to improve productivity, and, guarantee product quality, as an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. Industrial robot technology standards and application level, to a certain extent, reflect a level of national industrial automation. Currently, Industrial robot mainly tasked with welding, spraying, handling and stacking, repetitive and intensity of significant work.
The subject of the main part of the handling of their machinery discussions, and on the original mechanical structure proposed for the new improved method, which makes the handling robot is more applicable to the present industrial working environment. Through a detailed understanding of the robot in the industrial application, to propose specific handling robot design requirements, and according to the robot design principles of various parts, for the system as well as including: the robot's hand, wrist, arm, waist, the design of mechanical structures. The transfer robot driven by the source from the hydraulic system, and the implementation of components including: plunger hydraulic cylinders, hydraulic cylinders, swing, telescopic hydraulic cylinders, etc. Through the hydraulic cylinder movements to implement the joint transport robot motion, And realize the operational handling robot.
Keywords:Transfer robot;Hydraulic System;Mechanical Design
机械手的技术参数
对象:直径300mm,高400mm的柱形桶装;
抓重:100Kg(夹持式手部);
自由度数:3个(手抓张合、手臂上下、左右移动);
坐标形式:直角坐标;
目前使用的机械手的臂力范围较大,国内现有的机械手的臂力最小为0.15N,最大为8000N。安全系数K一般可在 。
1.4.2工作范围
机械手的工作范围根据工艺要求和操作运动的轨迹来确定。一个操作运动的轨迹是几个动作的合成,在确定的工作范围时,可将轨迹分解成单个的动作,由单个动作的行程确定机械手的最大行程。
本机械手的动作范围确定如下:
手臂升降行程350mm
手臂水平运动行程500mm
机械手的技术参数
(1) 抓重:100Kg(夹持式手部)
(2) 自由度数:3个(手抓张合、手臂上下、左右移动)
(3) 坐标形式:直角坐标
(4) 手臂运动参数
手臂左右行程:500mm
手臂上下行程:350mm


目 录
1绪论 1
1.1 工业机器人简介 1
1.2世界机器人的发展 3
1.3我国工业机器人的发展 4
1.4本文研究内容 5
1.4.1机械手的技术参数 5
1.4.2工作范围 6
1.4.3运动速度 6
1.4.4手臂的配置形式 7
2 结构设计 8
2.1总体的设计思路 8
2.2拟采用的设计方案 8
2.2.1自由度和坐标系的选择 8
2.2.2驱动方式的选择 8
2.2.3手臂的设计 9
2.2.4臂部的设计 9
2.2.5机座的设计 9
2.2.6机械手技术参数 9
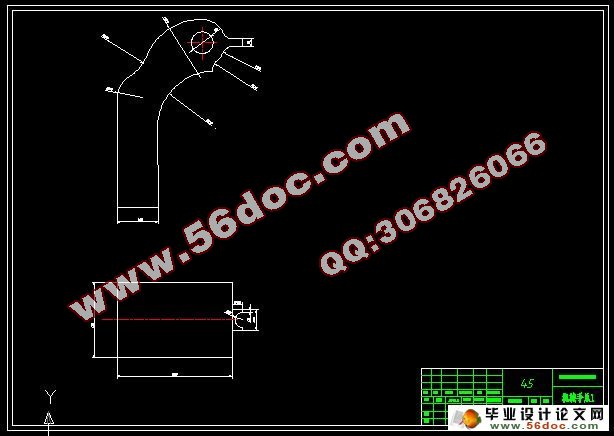
3手部结构 11
3.1概述 11
3.2设计时应考虑的几个问题 11
3.3夹紧力的计算 11
3.4夹紧缸的拉力计算 12
3.5确定缸的直径 12
4臂部的结构 14
4.1概述 14
4.2臂部具体设计方案及计算 14
4.3前后伸缩手臂的设计计算 15
4.3.1前后伸缩手臂驱动力的计算 15
4.3.2前后伸缩液压缸的内径计算 16
4.3.3活塞杆直径d的计算 17
4.4上下伸缩手臂的设计计算 17
4.4.1上下伸缩手臂驱动力的计算 17
4.4.2上下伸缩液压缸的内径计算 17
4.4.3活塞杆直径d的计算 17
5 液压系统简介 19
6总结 20
6.1主要任务 20
6.2技术要求 20
6.3设计步骤 20
6.3.1 搜集资料 20
6.3.2计算 21
6.3.3装配图及零件图的绘制 21
6.4 设计感想 21
参考文献 23
致 谢 24
毕业设计(论文)知识产权声明 25
毕业设计(论文)独创性声明 26