
重型纯电动扫路车总布置设计(含CAD零件图装配图,CATIA三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
重型纯电动扫路车总布置设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,论文说明书19000字,CAD图6张,CATIA三维图)
摘要
在过去的数十年里,很多城市一味地追求经济的快速发展而忽略了对环境的保护,随着我国城市化进程的持续加深以及大众生活质量的不断提高,社会各界对城市的环境质量也提出了更高的要求,城市环境问题逐渐受到重视。道路清扫作为城市环卫系统的重要一环,机械化设备已逐渐取代了传统的人工清扫模式,但现阶段很多城市采用的扫路车多为燃油式,这种双发动机式扫路车不仅燃油消耗率高,其排放和噪声对环境并不友好,因此开发纯电动扫路车已成为必然趋势。
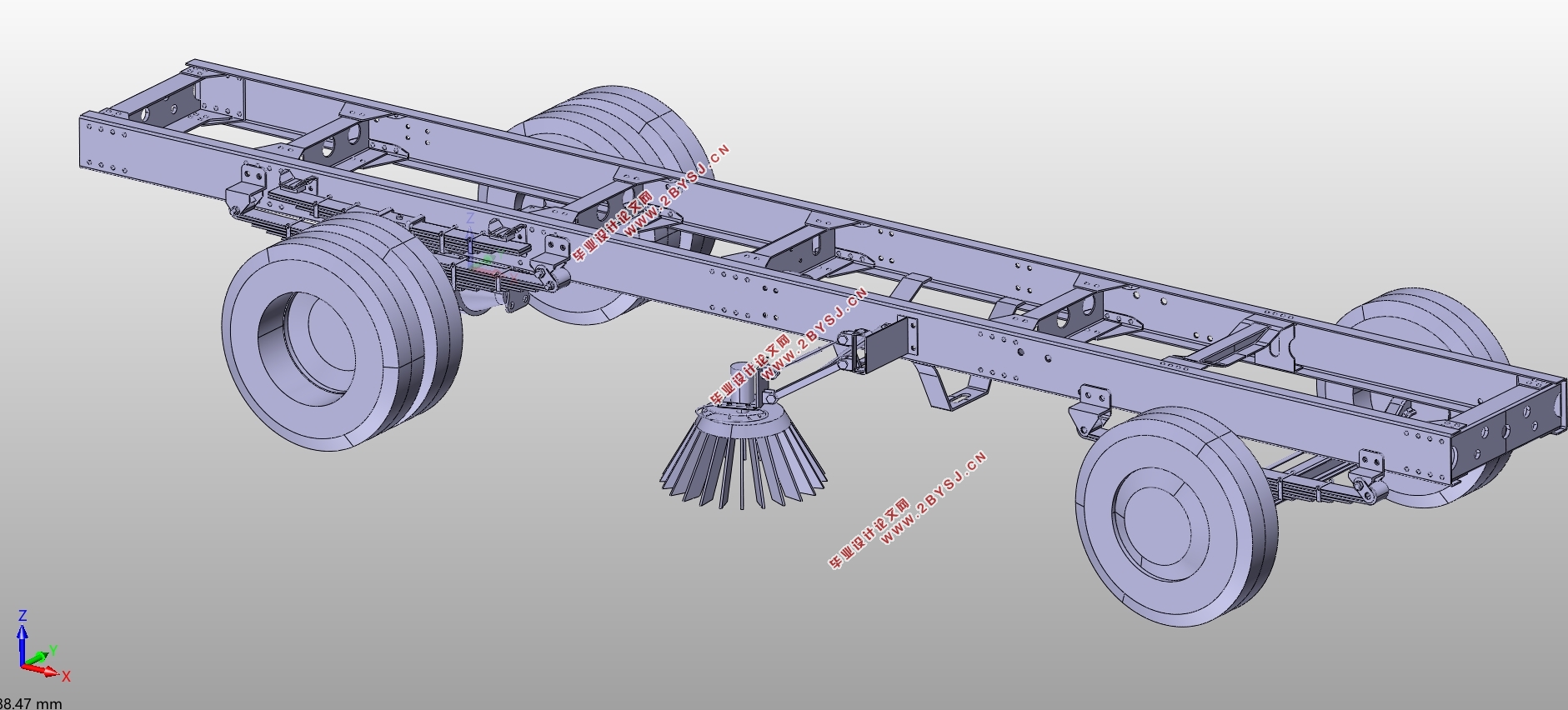
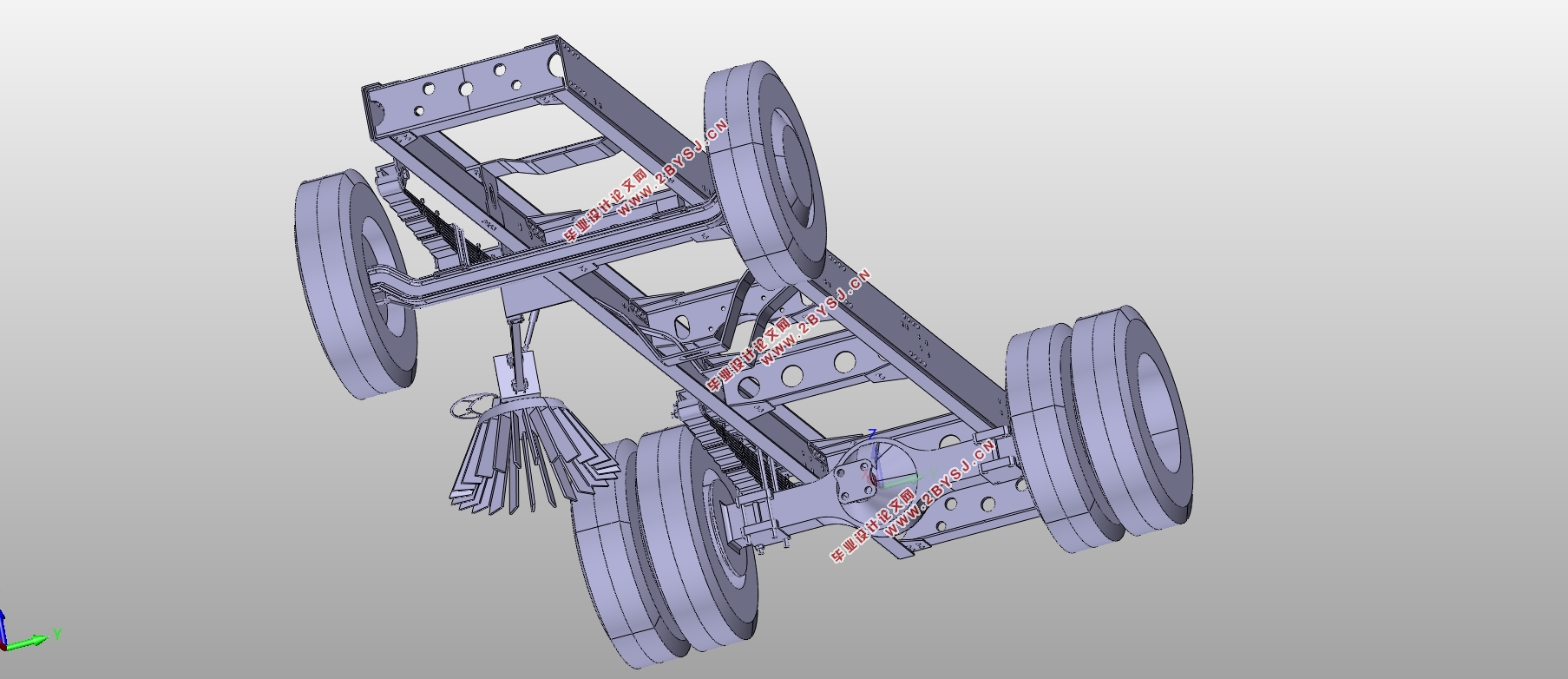
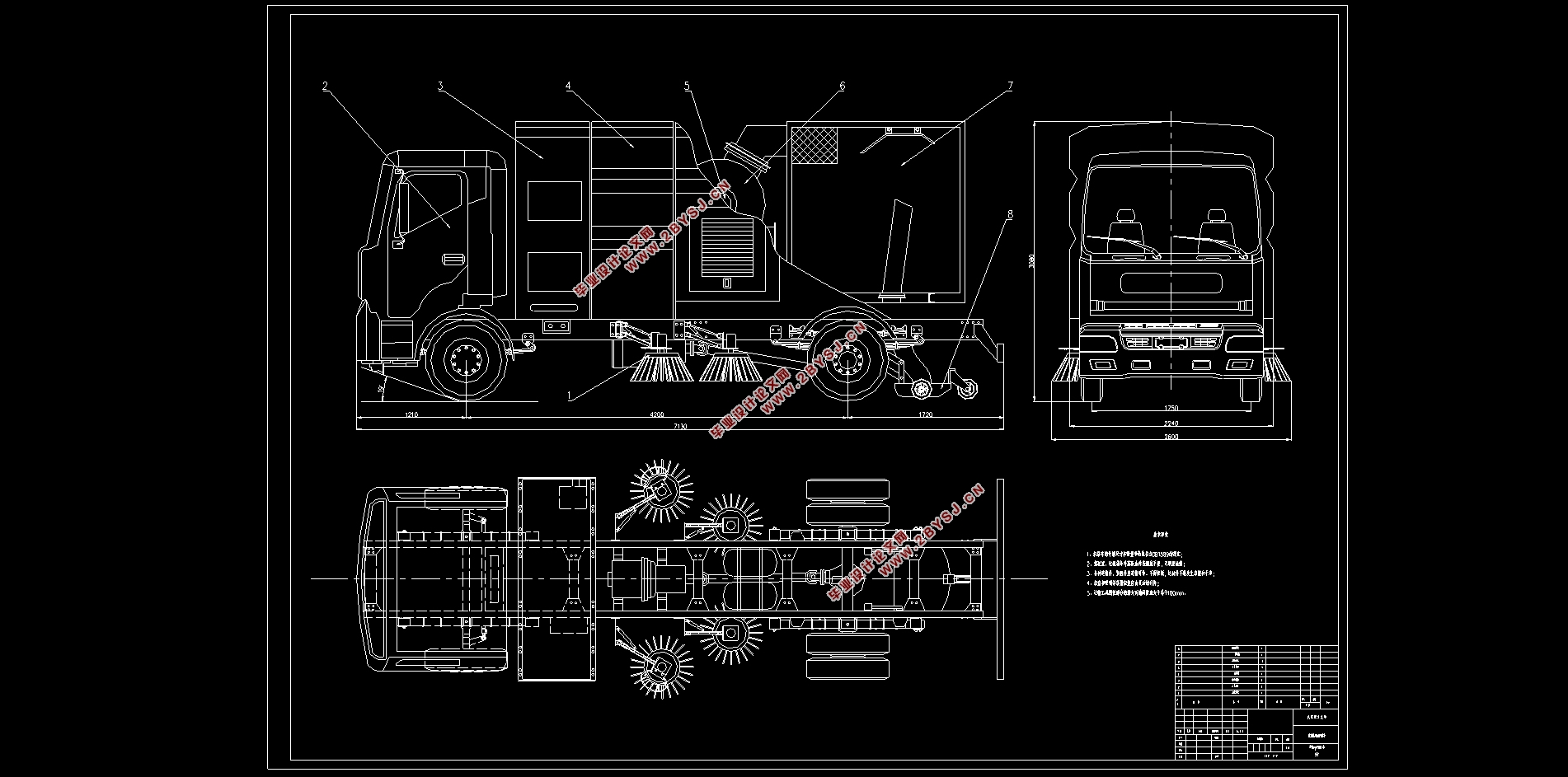
本文从基本的设计要求出发,首先确定了纯电动扫路车的总体布置方案,并对主要的质量参数、几何参数和性能参数进行选择,其次对整车的进行动力性匹配计算,确定了动力系统的基本参数,然后在此基础上参考同类车型并结合各项性能指标,完成了对动力系统、作业装置、车厢、车架和悬架的布置设计,建立了悬架和车架的三维CATIA模型并绘制了整车总布置的二维AutoCAD图以及相关零件图,最后对整车的轴荷分配进行了校核,对动力学性能和结构力学性能进行了分析验证,并利用ADVISOR对纯电动扫路车的经济性进行了仿真分析。
计算分析和仿真结果表明,纯电动扫路车的动力性能和续航里程满足设计要求,能够实现零排放且经济性良好,车架的力学性能满足使用要求,整车具有足够的安全性和可靠性,所得结果对于纯电动扫路车的产品开发具有重要的指导意义。
关键词:纯电动扫路车;总体布置;动力系统;参数匹配;性能分析
Abstract
In the past few decades, many cities have blindly pursued rapid economic development and neglected the protection of the environment. With the continuous deepening of urbanization in China and the continuous improvement of the quality of life of the people, all sectors of society have put forward higher requirements for the environmental quality of the city.And urban environmental issues have gradually received attention. Road cleaning is an important part of urban sanitation. Mechanized cleaning equipment has gradually replaced the traditional manual mode. However, many road sweepers used in many cities are fuel-based. This dual-engine sweeper not only has a high fuel consumption rate, but its its emissions and noise are not environmentally friendly. So the development of pure electric sweeper has become an inevitable trend.
Starting from the basic design requirements, this paper first determines the general layout plan of the electric sweeper, and selects the main quality parameters, geometric parameters and performance parameters. Secondly, the parameters of the vehicle's power system are matched and the basic parameters of the power system are determined. Then, with reference to similar models and combined with various performance indicators, the layout design of power system, working device, carriage, frame and suspension was completed.According to the above parameters, the three-dimensional CATIA model of the suspension and the frame was built and the two-dimensional AutoCAD drawing of the overall layout of the vehicle and related parts drawings were drawn. Finally, the axle load distribution of the vehicle is checked, and the dynamic performance and structural mechanical properties are analyzed and verified. And use ADVISOR to simulate the economics of electric road sweeper.
The calculation analysis and simulation results show that the power performance and cruising range of the pure electric sweeper meet the design requirements, which can achieve zero emission and good economy. The strength and rigidity of the frame meet the requirements of use, and the vehicle has sufficient safety and Reliability. The results obtained have important guiding significance for the product development of pure electric road sweepers.
Key Words:Pure electric sweeper;overall layout;power system;parameter matching;performance analysis
纯电动扫路车主要质量参数
整备质量(kg) 6970
载质量(kg) 4895
总质量(kg) 11995
前/后轴荷分配 4545/7450
目录
第1章绪论 1
1.1 选题背景及意义 1
1.2 扫路车概述 1
1.3 扫路车的发展现状及趋势 1
1.3.1 扫路车发展现状 1
1.3.2 扫路车发展趋势 2
1.4 本文研究内容及目标 2
第2章纯电动扫路车总体布置方案确定 4
2.1 纯电动扫路车基本构造及工作原理 4
2.2 扫路车总布置原则 4
2.3 驱动布置形式 5
2.4 清扫作业装置布置形式 5
第3章纯电动扫路车主要参数选择 6
3.1 车身坐标系 6
3.2 主要质量参数确定 6
3.3 主要几何参数确定 7
3.4 主要性能参数确定 8
第4章动力系统参数匹配计算 10
4.1 动力参数匹配方法 10
4.2 驱动电机参数匹配 10
4.2.1 扫路车对驱动电机的要求 10
4.2.2 电机类型选择 10
4.2.3 驱动电机参数 10
4.3 传动比设计 11
4.3.1 最小传动比选择 11
4.3.2 最大传动比选择 11
4.3.3 各挡传动比分配 12
4.4 动力电池参数匹配 12
4.4.1 扫路车对动力电池的要求 12
4.4.2 动力电池主要参数 12
第5章纯电动扫路车总布置设计 15
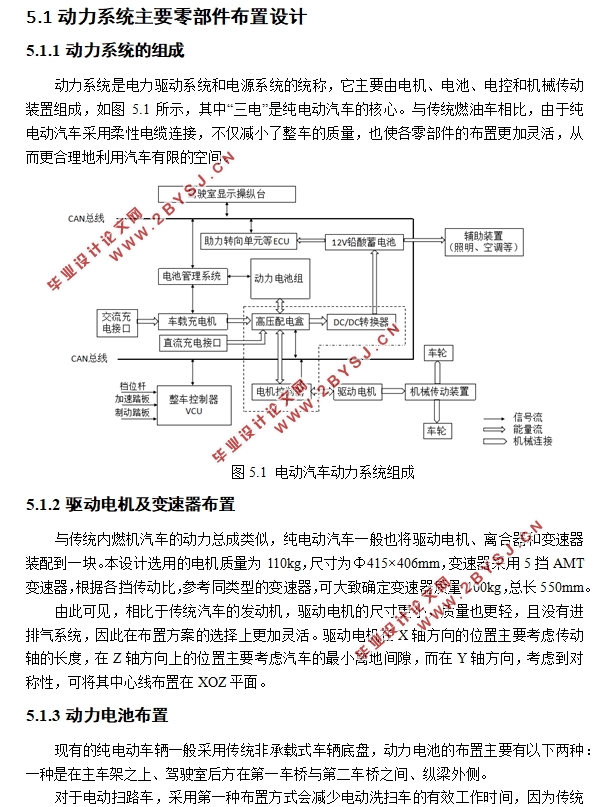
5.1 动力系统主要零部件布置设计 15
5.1.1 动力系统的组成 15
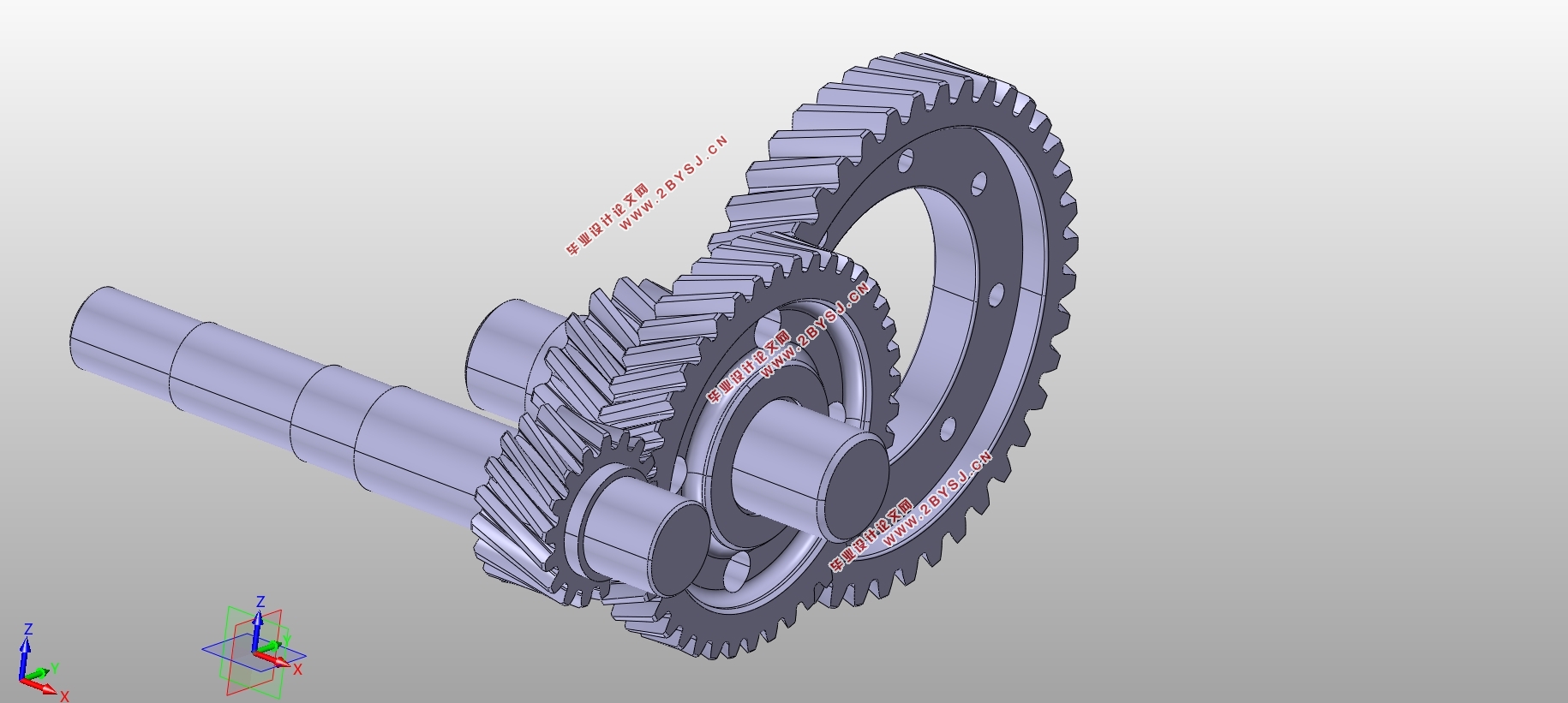
5.1.2 驱动电机及变速器布置 15
5.1.3 动力电池布置 15
5.1.4 电控系统布置 16
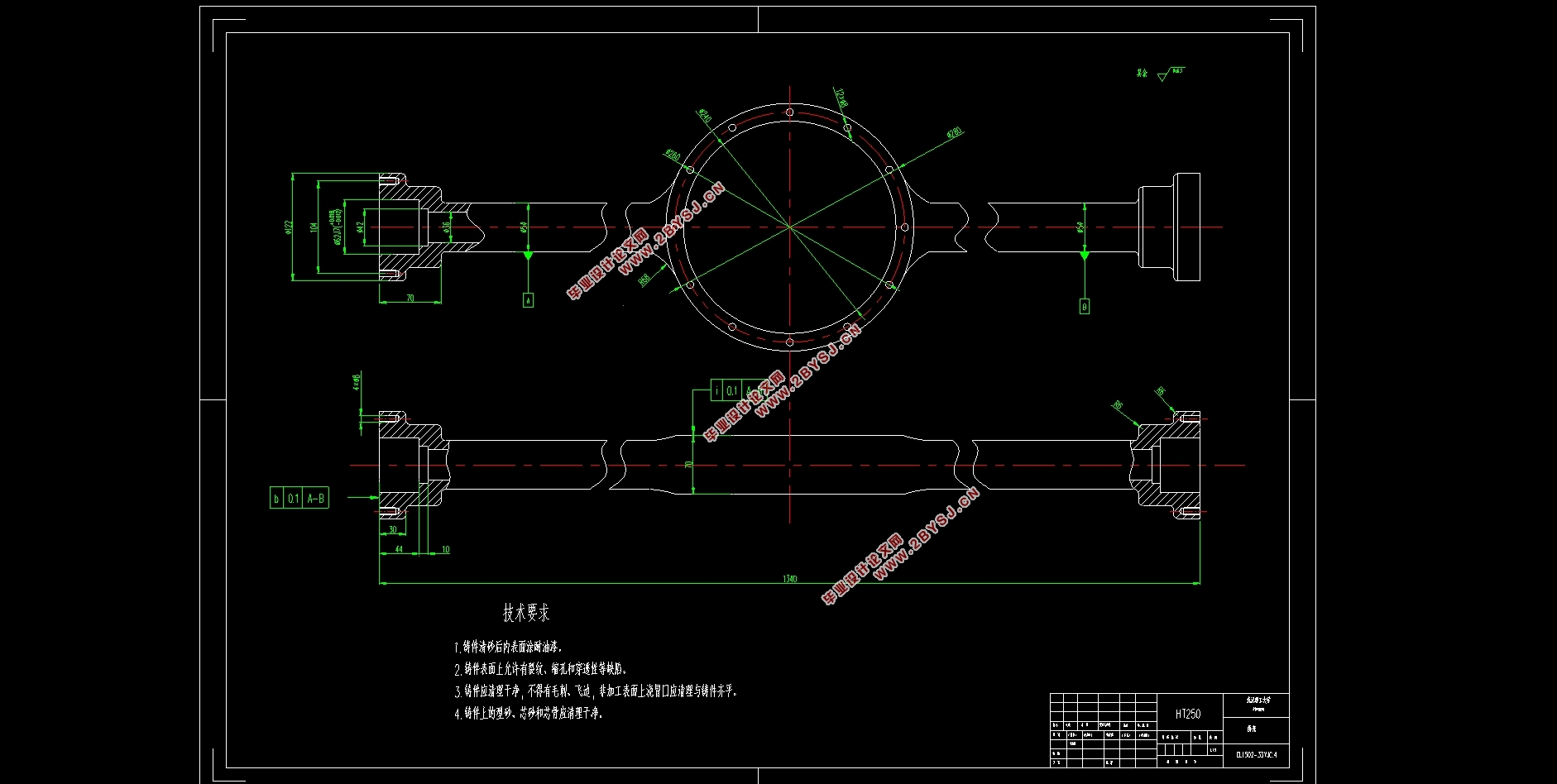
5.1.5 机械传动装置设计与布置 17
5.2 作业装置主要零部件布置设计 19
5.2.1 扫盘布置 19
5.2.2 风机组件 20
5.2.3 吸嘴总成布置 21
5.3 车厢布置 22
5.3.1 清水箱布置 22
5.3.2 垃圾箱布置 22
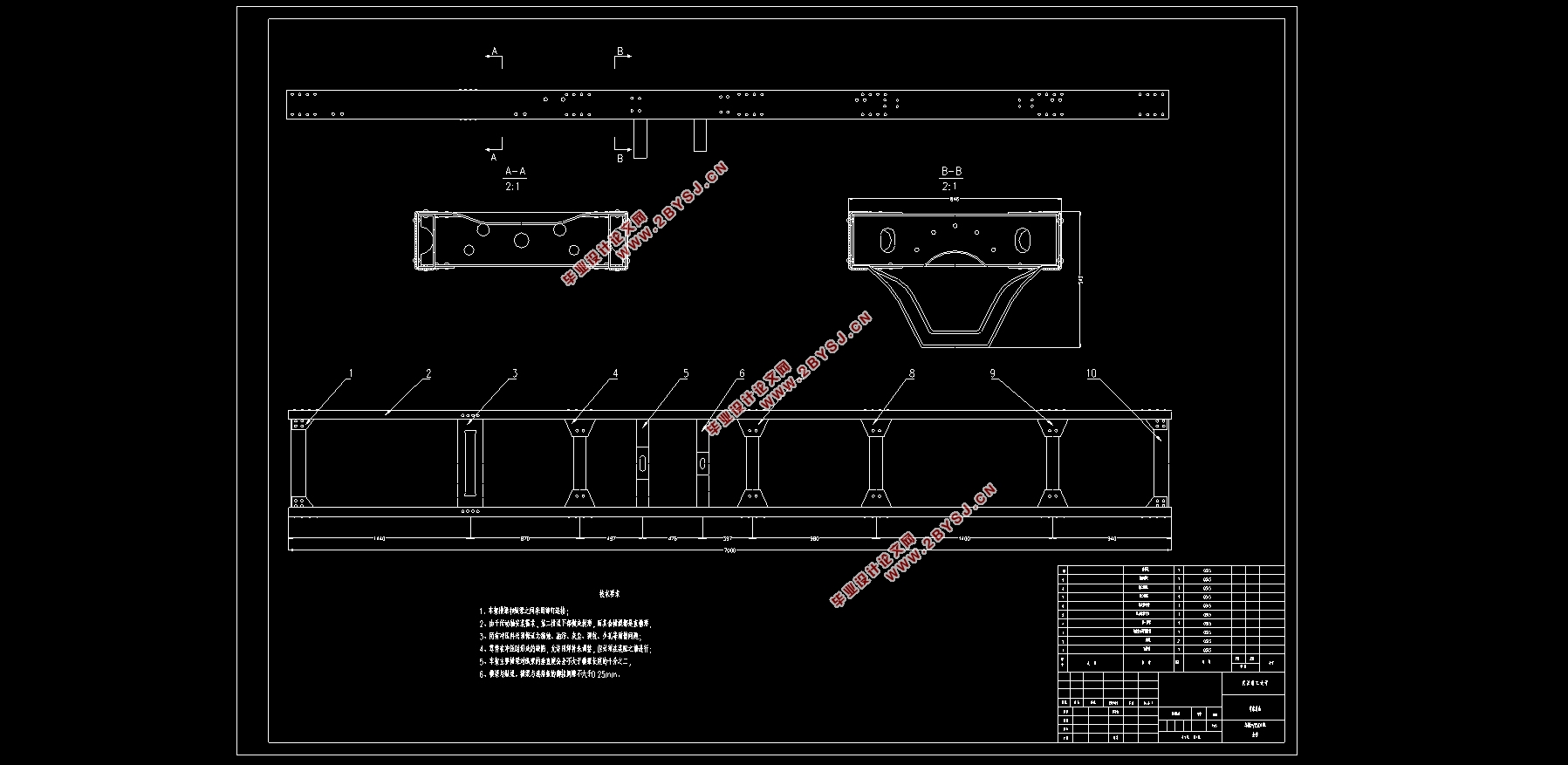
5.4 车架设计与布置 22
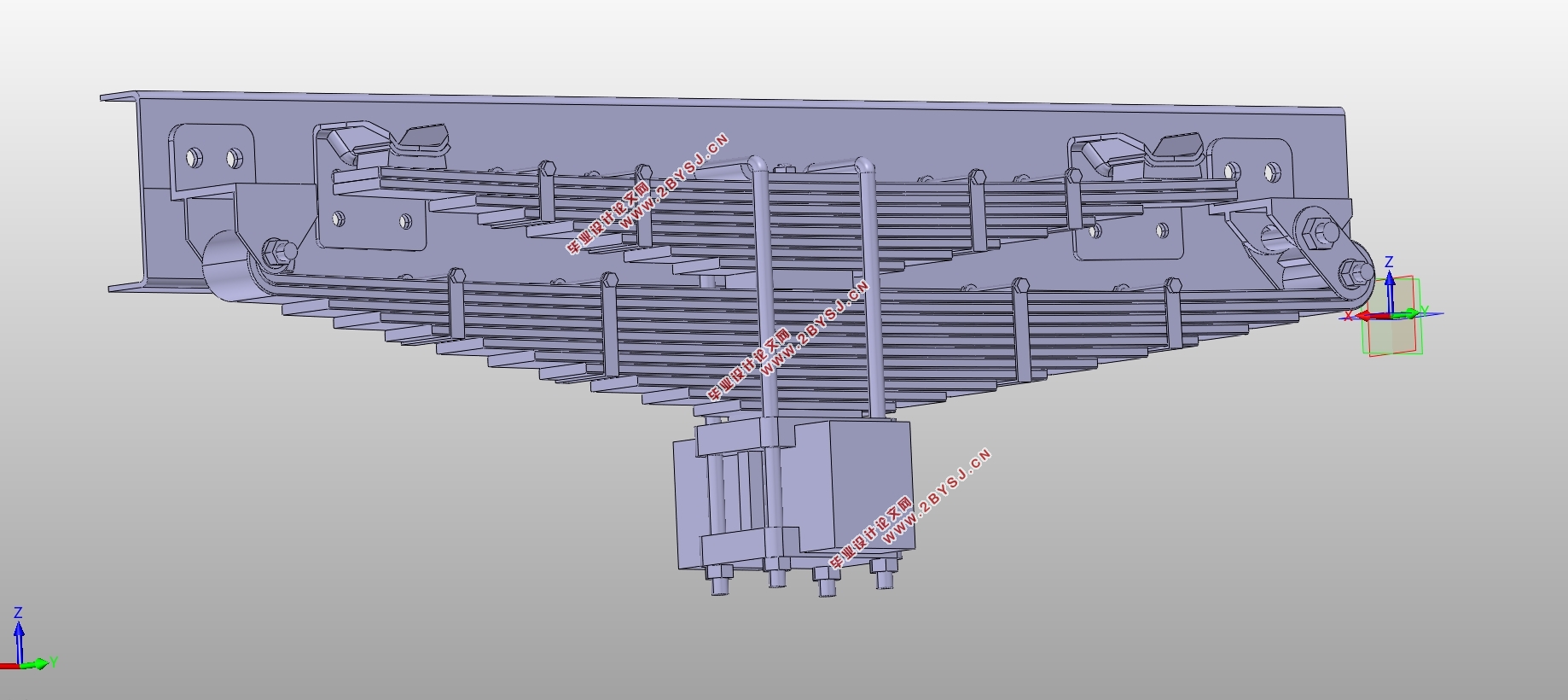
5.5 悬架设计与布置 23
5.5.1 悬架偏频及静扰度 23
5.5.2 弹性元件计算 24
5.5.3 减振器选择 25
第6章整车性能分析及总布置校核 26
6.1 质心估算及轴荷分配 27
6.2 动力学性能分析 28
6.2.1 动力性 28
6.2.2 制动性 28
6.2.3 通过性 29
6.3 基于ADVISOR的经济性仿真分析 30
6.3.1 建模流程 30
6.3.2 纯电动扫路车仿真模型构建 30
6.3.3 仿真结果分析 32
6.4 车架结构力学性能分析 34
6.4.1 车架强度校核 34
6.4.2 车架刚度校核 36
总结与展望 38
总结 38
展望 38
参考文献 39
致谢 40