
CO2焊接机械手底座和腕部的结构设计
无需注册登录,支付后按照提示操作即可获取该资料.
CO2焊接机械手底座和腕部的结构设计(开题报告,毕业论文说明书11000字,CAD图纸4张)
[摘要] CO2焊接是一种永久性连接金属材料的方法,通过加热、加压,或两者并用,使两个分离的物体产生原子(分子)间结合而连接成整体的过程,在工业中应用广泛。但是由于人工焊接有许多不利因素,而利用CO2机械手则可以避免,故其应用广泛。
本设计为CO2焊接手底座和腕部的结构设计,本设计从整体布局入手,参考现有关节型机械臂的相关设计,确定了电机的选型,安装等相关设计,在机械臂的灵活和精度的前提下完成总体结构的设计,然后根据总体结构,从而确定本设计的机械臂各个主要零部件的设计,本设计整体在现有的有关节型机械臂的结构上做了修改,使得它能够更好的满足本设计的设计要求,本设计结构简单,重量轻。外形尺寸小,设备费用低,运作安全,操作方便,便于维修和管理。
[关键词] 底座和腕部;CO2焊接;机械手
The structure design of CO2 welding robot base and wrist
[Abstract] CO2 welding is a permanent connection method of metal materials, by heat, pressure, or a combination of both, two separate objects to produce atomic (molecular) binding and connected into a whole process, is widely used in industry. But because there are many disadvantages of manual welding, and the use of CO2 manipulator can be avoided, so it is widely used.
The design for CO2 welding structure design of wrist and hand base, the design of the overall layout of, the reference related to the design of the existing joint type manipulator, determine the motor selection, installation and other related design, under the premise of the flexibility and accuracy of the mechanical arm completed the overall structure of the design, then according to the overall structure, so as to determine the design of manipulator each main spare part design, the design of the whole in existing joint type manipulator structure has been modified, making it better able to meet the design requirements of the design, the design has the advantages of simple structure, light weight. Small appearance, low cost, safe operation, convenient operation, easy maintenance and management.
[keyword] the base and the wrist;CO2 welding; mechanical hand
主要研究内容
(1)CO2焊接机械手底座和腕部的方案分析;
(2)CO2焊接机械手底座和腕部的相关零件强度计算;
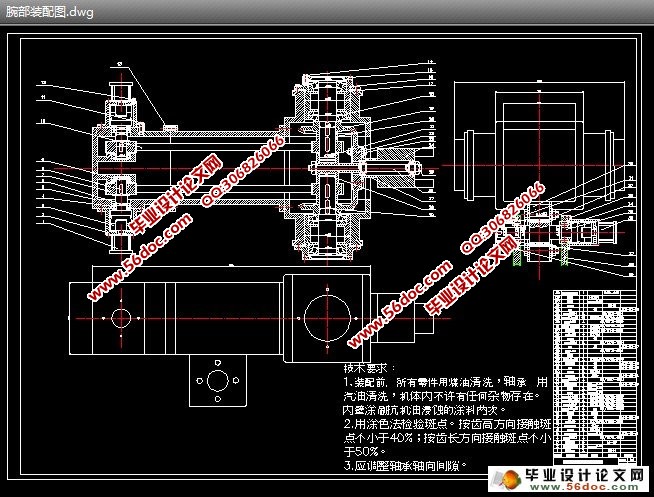
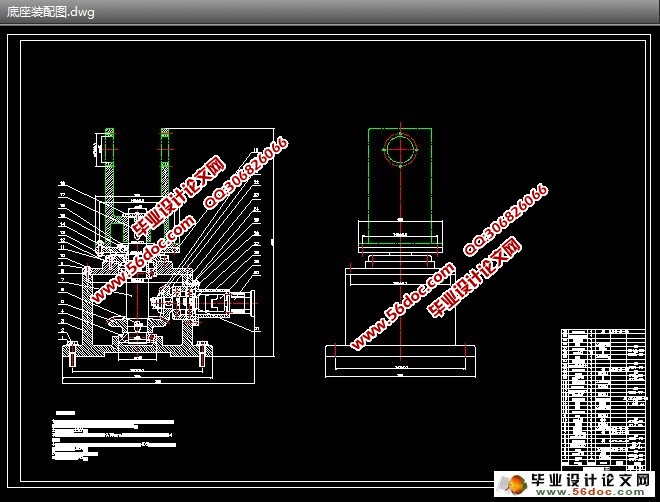
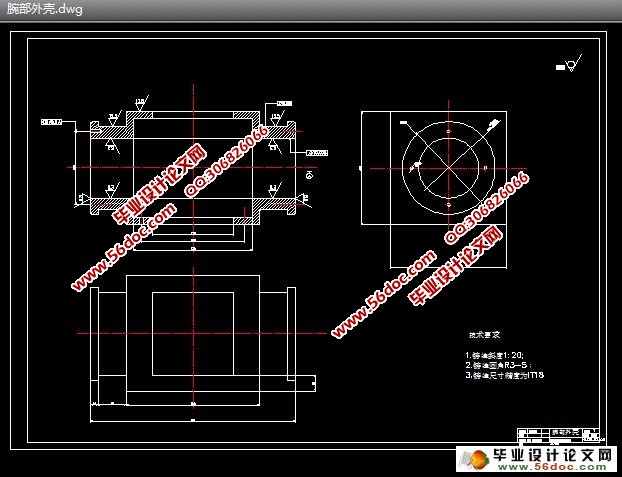
(3)CO2焊接机械手底座和腕部的零部件图和总装配图各一套;
(4)主要零部件设计计算与校核。

目 录
任务书 Ⅰ
开题报告 Ⅱ
指导教师审查意见 Ⅲ
评阅老师评语 Ⅳ
答辩会议记录 Ⅴ
中文摘要 Ⅵ
外文摘要 Ⅶ
1前言 1
2选题背景 2
2.1 课题来源 2
2.2 研究的目的与意义 2
2.3 机械手的简介和国内外现状 3
2.4 本文研究的主要内容 5
3底座的结构设计与校核 5
3.1底座结构示意简图 5
3.2底座锥齿轮的设计 6
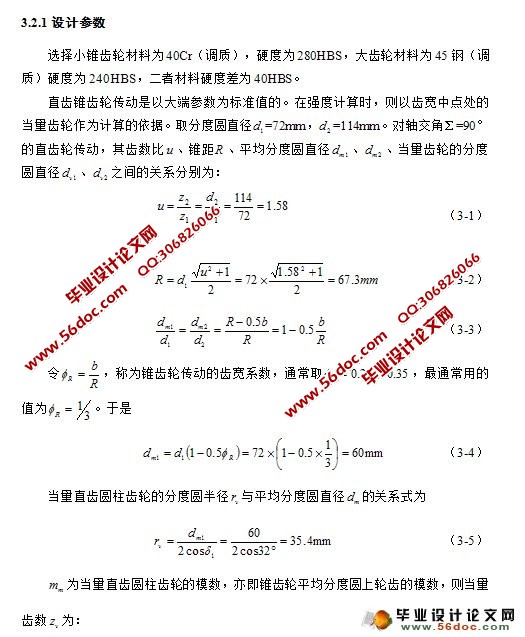
3.2.1设计参数 6
3.2.2 齿轮的受力分析 7
3.2.3 齿根弯曲疲劳强度计算 8
3.2.4 齿面接触疲劳强度计算 9
3.3 底座传动轴的设计 9
3.4 底座回转驱动电机的选择 11
3.5 底座轴键的校核 12
3.6 联轴器的选择 13
3.7 轴承的选择 14
3.8 底座装配图 15
4 CO2焊接机械手腕部的设计及计算 16
4.1腕摆电机的选择 16
4.2腕摆锥齿轮传动的强度计算 17
4.2.1齿轮的设计参数 17
4.2.2齿轮的受力分析 19
4.2.3齿根弯曲疲劳强度计算 19
4.2.4齿面接触疲劳强度计算 20
4.3同步带设计 21
4.4小臂传动轴的设计及校核 23
4.5腕部细长轴的设计和刚度校核 25
4.6联轴器的选择 27
4.7轴承的选择 28
5总结 30
参考文献 30
致谢 31