
基于液压控制的通用平移机械手的设计
无需注册登录,支付后按照提示操作即可获取该资料.
基于液压控制的通用平移机械手的设计(含选题审批表,任务书,开题报告,中期检查表,论文说明书11000字,CAD图纸6张合一)
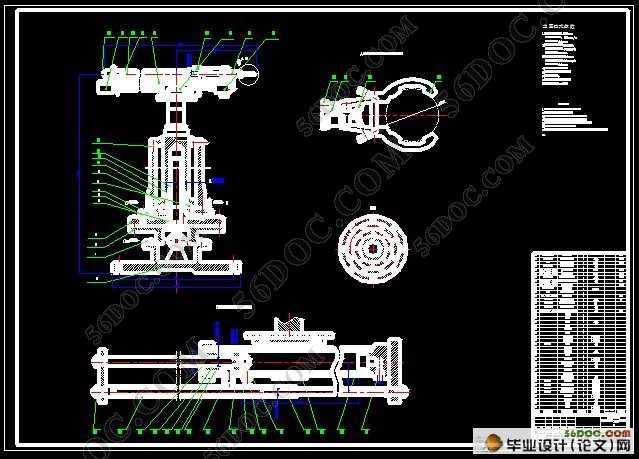
摘 要:文章主要叙述了机械手的设计计算过程 。首先,本文介绍机械手的作用,机械手的组成和分类,说明了自由度和机械手整体坐标的形式。同时,本文给出了这台机械手的主要性能规格参量。文章中介绍了搬运机械手的设计理论与方法,全面详尽的讨论了搬运机械手的手部、腕部、手臂以及机身等主要部件的结构设计。
关键词:机械手;液压传动;液压缸
The Desing Of All-purpose Displacement Manipulator Based On Hydraytic Control
Abstract: This article mainly narrated the design calculation of the manipulator. Simultaneity, the paper also introduces the function, composing and classification of the manipulator, explains the free-degree and the form of manipulators’ whole coordinate; and gives out the primary specification and standard parameter of this manipulator, Introduces the design theory and method of the manipulator, comprehensively and exhaustively discussed the transported manipulator's hand, wrist, arm ,and fuselage and so on ,which the major parts’ structural computation.
Key words: manipulator; hydraulic power transmission;Hydraulic cylinder
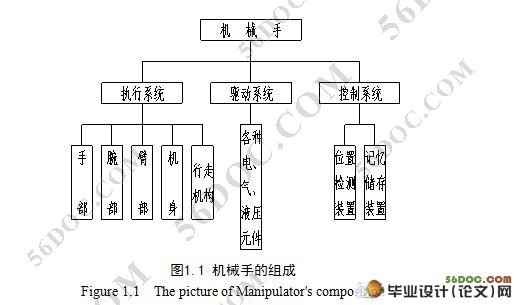
1.3.2驱动机构
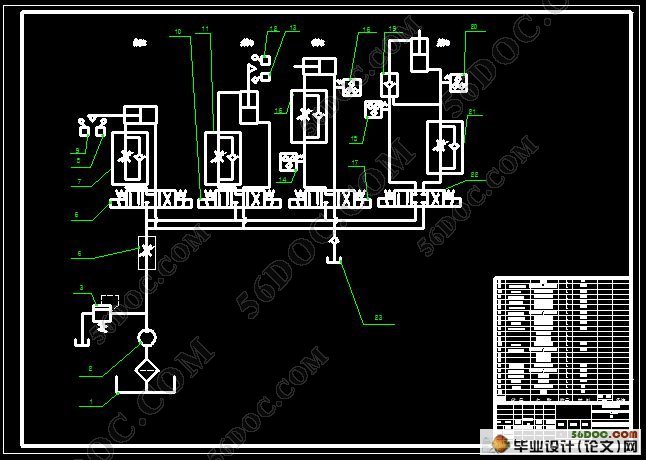
驱动机构是工业机械手的重要组成部分。根据动力源的不同, 工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便。
1.3.3控制系统分类
在机械手的控制上,有点动控制和连续控制两种方式。大多数用插销板进行点位控制,也有采用可编程序控制器控制、微型计算机控制,采用凸轮、磁盘磁带、穿孔卡等记录程序。主要控制的是坐标位置,并注意其加速度特性。
2 总体设计方案
2.1 机械手的确定
常用工业机械手按驱动方式分:直角坐标式、圆柱坐标式、球坐标式、多关节式。其中直角坐标式手臂可沿X、Y、Z坐标轴作直线移动,即伸缩、升降和横移。其特点是直观性好,所占空间位置大。根据设计任务所需,特选定为直角坐标式。
#p#副标题#e#
目 录
摘要……………………………………………………………………………1
关键词…………………………………………………………………………1
1前言………………………………………………………………………………2
1.1工业机械手的发展与设计………………………………………………… 2
1.2工业机械手在生产中的应用……………………………………………… 2
1.3机械手的组成……………………………………………………………… 3
1.3.1执行机构…………………………………………………………… 3
1.3.2驱动机构…………………………………………………………… 4
1.3.3控制系统分类……………………………………………………… 4
2总体设计方案……………………………………………………………………4
2.1机械手的确定……………………………………………………………4
2.2驱动机构的选择………………………………………………………5
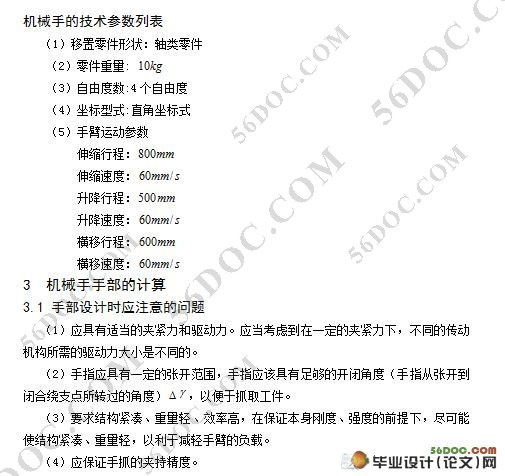
2.3机械手的技术参数列表…………………………………………………5
3机械手手部的计算………………………………………………………………6
3.1手部设计时应注意的问题…………………………………………6
3.2典型的手部结构……………………………………………………6
3.3机械手手部结构的设计计算………………………………………6
3.3.1选择手部的类型及夹紧装置…………………………………6
3.3.2夹紧力及驱动力的计算………………………………………7
3.4弹簧的设计计算……………………………………………………8
4机械手腕部…………………………………………………………………10
5机械手臂部的设计及有关计算………………………………………………10
5.1臂部设计时应注意的问题……………………………………………10
5.2手臂的典型结构以及结构的选择……………………………………10
5.2.1手臂的典型运动机构…………………………………………11
5.2.2手臂运动机构的选择…………………………………………11
5.3 X方向…………………………………………………………………11
5.3.1手臂摩擦力的分析与计算……………………………………………11
5.3.2手臂惯性力的计算……………………………………………………12
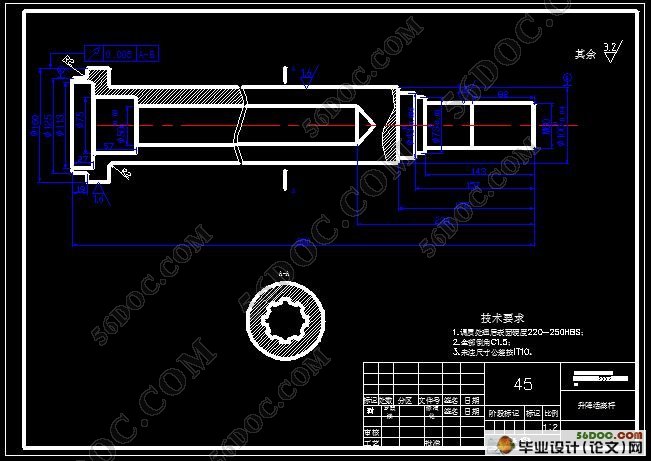
5.3.3液压缸工作压力和结构的确定………………………………………13
5.3.4确定液压缸的结构尺寸………………………………………………13
6机身的设计计算…………………………………………………………………14
6.1机身设计时应注意的问题………………………………………………15
6.2 Y方向………………………………………………………………………15
6.3 Z方向………………………………………………………………………15
7工业机械手的平稳性与定位精度…………………………………………………17
8 液压元件的选择 …………………………………………………………………17
8.1主要技术参数……………………………………………………………17
8.2液压泵的选择……………………………………………………………18
8.3确定电机功率……………………………………………………………19
8.4液压阀的选择……………………………………………………………19
8.5油管的设计………………………………………………………………20
8.6油箱的设计…………………………………………………………………20
9液压系统的验算……………………………………………………………………21
9.1压力损失的验算…………………………………………………………21
9.1.1回路压力损失的验算……………………………………………21
9.1.2局部压力损失验算………………………………………………21
9.2计算液压系统的发热温升………………………………………………21
10小结…………………………………………………………………………23
参考文献 ………………………………………………………………………23
致谢……………………………………………………………………………24