
气动机械臂的设计(PLC)
无需注册登录,支付后按照提示操作即可获取该资料.
气动机械臂的设计(PLC)(任务书,开题报告,外文翻译,进度计划表,论文说明书16000字)
摘 要
本文简要介绍了工业机器人的概念,讲述了机械臂的分类与历史还有当今国内外的发展状况,机械臂硬件和软件的组成,即机械臂各个部件的整体尺寸设计与校核,气动技术的特点与优点,PLC控制的特点,PLC控制的气动机械臂系统的工作原理。本文对机械臂进行总体的方案设计:
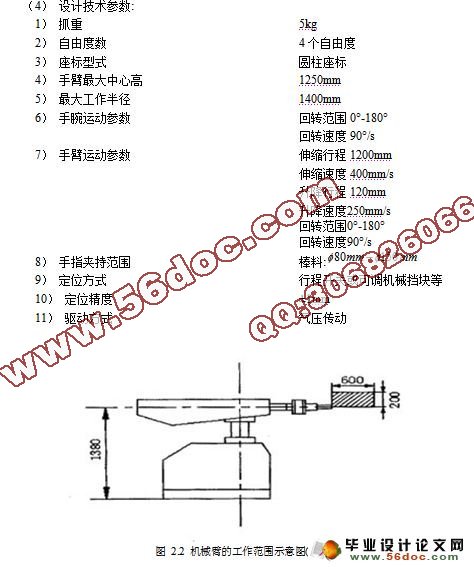
1、确定了机械臂的坐标形式,自由度和机械臂的各项技术参数。
2、设计了机械臂的手臂结构,计算出了回转气缸的尺寸大小以及升降气缸的大小,并对手臂伸缩气缸进行了选型和校核。
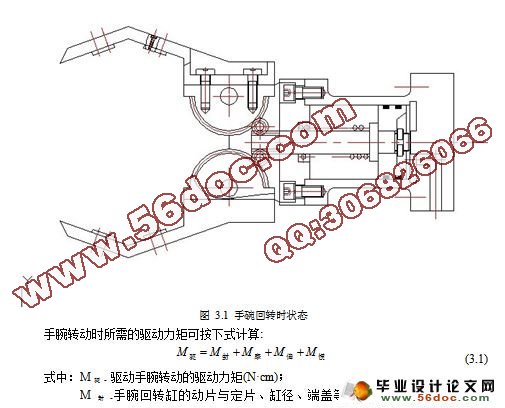
3、设计了机械臂的夹持式手部结构和机械臂的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
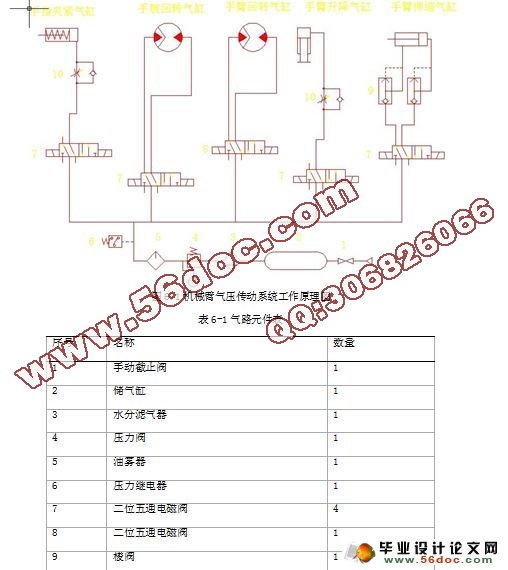
4、设计出了机械臂的气动系统,绘制了机械臂气压系统工作原理图。
因为设计的机械臂为通用机械臂,分析了可编程控制器是如何来控制气动机械臂的运动与工作,可以利用可编程序控制器根据需要编写不同的程序对机械手进行控制,最终做出了机械臂运动的流程图。
关键词:气动;工业机器人;机械臂;PLC。
Abstract
This article briefly introduces the concept of industrial robots, telling the story of the classification of the mechanical arm and the historical and current development status at home and abroad, robot arm of hardware and software.The robot arm design and check the overall dimensions of the parts, the characteristics and advantages of pneumatic technology, PLC control, the characteristics of the working principle of PLC control system of pneumatic manipulator. In this article, the robot arm for the overall scheme design.
1、Determining the coordinates of the mechanical arm forms,degrees of freedom, and the technical parameters of manipulator.
2、Designing the manipulator arm structure, calculating the rotary cylinder size and the size of the lift cylinder, and the selection and checking of the telescopic cylinder and the arm .
3、Designing holding type hand structure of mechanical arm and the robot arm's wrist structure.Calculating the driving moment of the wrist when needed and driving moment of the rotary cylinder.
4、Designing the pneumatic system of mechanical arm and the map of mechanical arm pressure system working principle.
5、Because the mechanical arm is designed for general mechanical arm, analysis of the programmable logic controller is how to control the pneumatic motor and mechanical arm.We can make use of the programmable controller according to the need to write a different program to control the manipulator, finally making the mechanical arm movement flow chart.
Key words: Air pressure drive; Industrial robot; Robot arm; Programmable Logic Controller.
目 录
摘 要 III
ABSTRACT IV
目 录 V
1 绪 论 1
1 .1 机械臂概论 1
1.1.1 机械臂历史与发展 1
1.1.2 机械臂的历史 2
1.1.4 机械臂的组成 2
1.1.4 机械臂的分类 3
1.2 气动技术概述 3
1.3 气动机械臂的设计要求 4
2 机械臂整体设计方案 5
2.1 机械臂的座标型式与自由度 5
2.2 机械臂的手腕结构方案设计 5
2.3 机械臂的手臂结构方案设计 6
2.4 机械臂的手部结构方案设计 6
2.5 机械臂的驱动方案设计 6
2.6 机械臂的控制方案设计 6
2.7 机械臂的主要技术参数 6
3 手腕结构设计 9
3.1 手腕的自由度 9
3.2 手腕的驱动力矩的计算 9
3.2.1 手腕转动时所需的驱动力矩 9
3.2.2 回转气缸的驱动力矩计算 11
3.2.3 手腕回转缸的尺寸及其校核 12
4 手臂伸缩,升降,回转气缸的尺寸设计与校核 15
4.1 手臂回转气缸的尺寸设计与校核 15
4.1.1 尺寸设计 15
4.1.2 尺寸校核 15
4.2 手臂伸缩气缸的尺寸设计与校核 16
4.2.1 手臂伸缩气缸的尺寸设计 16
4.2.2 尺寸校核 16
4.2.3 平衡装置 16
4.2.4 导向装置 16
4.3 手臂升降气缸的尺寸设计与校核 17
4.3.1 尺寸设计 17
4.3.2 尺寸校核 17
5 手部结构设计 18
5.1 夹持式手部结构 18
5.1.1 手指的形状和分类 18
5.1.2 设计时考虑的几个问题 18
5.1.3 手部夹紧气缸的设计 18
6 气动系统设计 22
6.1 气动系统设计的主要内容及设计程序 22
6.2 气压传动系统原理图 22
7 机械臂的控制方式 25
7.1 可编程序控制器的选择及工作过程 25
7.1.1 可编程序控制器的选择 25
7.1.2 可编程序控制器的工作过程 25
7.2 可编程序控制器的使用步骤 25
7.3 控制系统的工作原理 26
7.4 控制要求 26
7.4.1 手动工作方式 26
7.4.2 单动工作方式 26
7.4.3 自动工作方式 27
7.5 气动机械手的工作流程 27
8 结 论 29
8.1 结论 29
8.2 不足之处及展望 29
致 谢 30
参考文献 31