
数控铣床自动装卸料气动机械手PLC控制设计
无需注册登录,支付后按照提示操作即可获取该资料.
数控铣床自动装卸料气动机械手PLC控制设计(19000字)
【摘要】
在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机器人等。而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。机械手是机器人的操作机,是机器人完成各种任务的执行机构。
本文主要针对生产线上的自动化设计了一个四自由度搬运机械手,实现生产的自动化。减轻了工人的劳动强度,提高了劳动生产率。
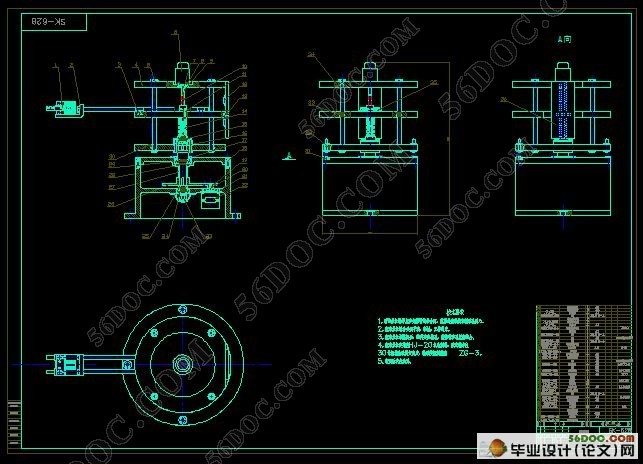
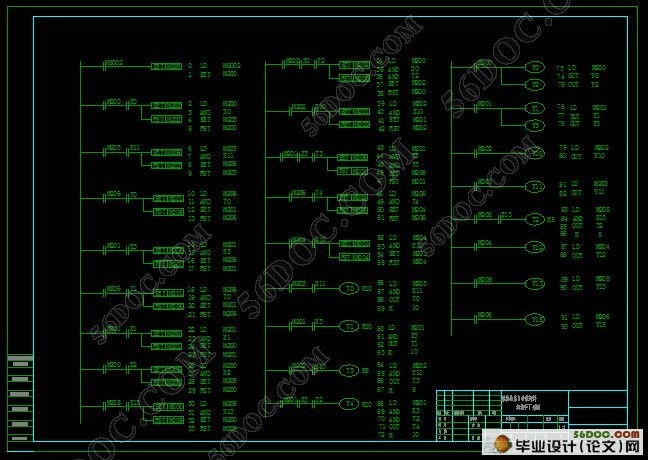
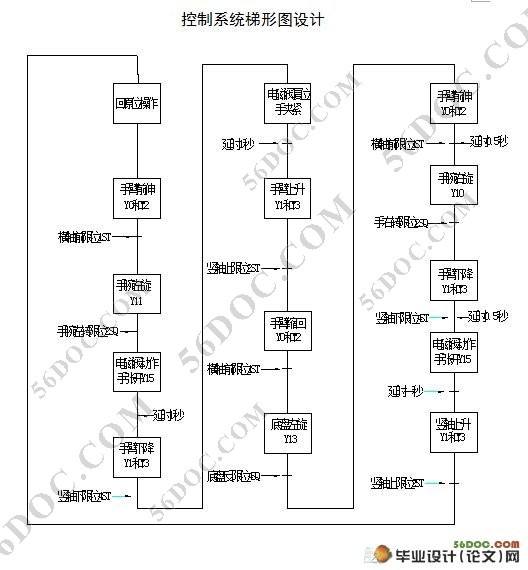
该机械手采用电机驱动,实现了伸缩、升降、旋转、夹紧等动作。为了现实这些动作,采用部件设计,分别实现这些动作。比如了为实现伸缩这个动作,设计了一个水平伸缩机构。PLC把各个部件的独立运动协调起来,形成了一个有规则运动系统。各个部件的联接,先铸造出一个合格的机械本体,把各个部件安装在机械本体上,形成一个机器。控制系统采用PLC控制,程序用T形图编写。
【关键词】: PLC;四自由度;工业机器人。
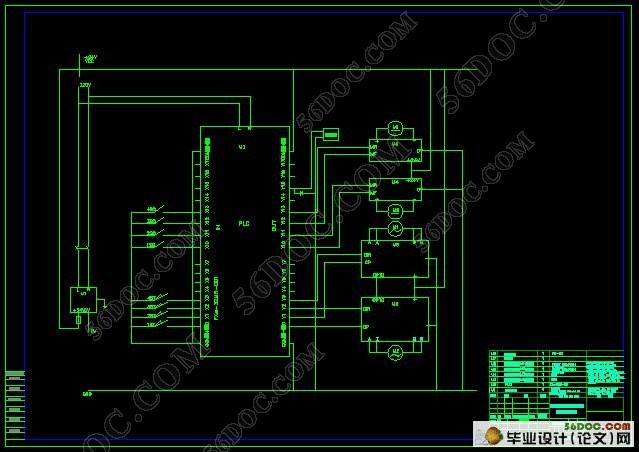
本设计的机械手有四个自由度,分别用两个步进电机来驱动提升机构和伸缩机构,用两个直流电机来完成手腕部和腰部的旋转动作,在提升机构中用两个限位开关来限制机械手的上下运动边界,伸缩机构中同样也是用两限位开关来限制机械手的前后运动边界,在手腕部和腰部分别用两个接近开关来限制正反转的极限角度,所以 PLC的输入点数有八个,两个步进电机分别用两个步进电机驱动器控制,两个直流电机用两个直流电机控制器控制,手抓的夹紧和张开用一个电磁阀控制


#p#副标题#e#
目录
摘要 2
目录 3
第一章 绪论 5
第二章 滚珠丝杠螺母副的选型 7
第一节 提升机构滚珠丝杠副的计算及选型 7
一、 计算进提升率引力 7
二、 计算最大动负载 8
三、 滚珠丝杠螺母副的选型 9
四、 传动效率的计算 10
五、 刚度验算 10
第二节 伸缩机构滚珠丝杠副的计算及选型 12
一、 计算进伸缩率引力Fm 12
二、 计算最大动负载C 12
三、 滚珠丝杠螺母副的选型 13
四、 传动效率的计算 13
五、 刚度验算 13
第三章 齿轮传动比计算 15
第一节 提升机构齿轮箱传动比计算 15
第二节 伸缩机构齿轮箱传动比计算 15
第四章 电机的计算和选型 17
第一节 步进电机概述 17
一、 感应子式步进电机特点 17
二、 驱动控制系统组成 17
第二节 步进电机的计算及选型 14
一、 提升机构步进电机的计算及选型 18
二、 伸缩机构步进电机的计算及选型 22
第三节 直流电机的选型 26
一、 手腕回转机构直流电机的选型 26
二、 腰部回转机构直流电机的选型 28
第五章 接近开关及限位开关的选型 30
第一节 接近开关的工作原理及选型 30
一、 接近开关概述 30
二、 接近开关的选型 32
第二节 限位开关的工作原理及选型 33
第六章 机械手PLC控制系统设计 35
第一节 PLC的基本概念 35
一、 PLC产生和发展过程 35
二、 PLC的应用领域 36
三、 PLC的发展趋势 37
四、 PLC的特点 38
五、 PLC的分类 39
第二节 PLC的工作原理 40
一、 梯形图编辑 41
二、 梯形图的格式 42
三、 PLC梯形图编程格式的特点 42
第三节 PLC的选型及PLC外部接线图设计 42
第四节 控制系统梯形图设计 44
结 论 45
致 谢 46
参考文献 47