
基于51单片机的智能蓝牙循迹小车的设计
无需注册登录,支付后按照提示操作即可获取该资料.
基于51单片机的智能蓝牙循迹小车的设计(论文13000字)
摘要:随着各种智能终端的发展,以及物流运输的需要,智能车的研究和开发已经成为广泛关注的焦点,很多国家和公司都投入巨额资金打造智能车终端。本课题是基于51单片机的车辆循迹系统,并加入蓝牙模块。该系统的控制中心是STC89C52单片机,并选用L298N芯片构建双H桥操纵直流电机,使用光电检测传感器TCRT5000对路面黑线进行探测,并将结果传输回单片机,及时控制小车左右两边轮速调整前进方向,从而使小车能够跟随黑线运动。另外,小车加入HC-05蓝牙模块,能通过手机端蓝牙APP对小车的遥控。
关键词:单片机;光电检测器;蓝牙;自动小车
Bluetooth tracking vehicle based on 51 MCU
Abstract: With the development of intelligent terminal and the requirement of transportation, the research and development of intelligent vehicle has become the focus of researcher attention. Many countries and companies are investing much money on the development of intelligent vehicle. This design is an automatic tracking system of vehicle based on the control of STC89C52 MCU (Microprogrammed Control Unit). The main controller of this system is STC89C52 MCU. Double H-bridges are structured by the L298N driver chip to control the DC (Dircet Current) motors. The infrared reflective photoelectric sensors TRCT5000 detect the black line on the road and return the results to the MCU. Then the MCU will analyze the results and adjust the speed of wheels. Then the vehicle can follow the black line. Besides, Bluetooth is added into the system, so that the vehicle can be controlled by the Bluetooth app in the mobile phone.
Key words: MCU; Photoelectric detector; Bluetooth; Automatic vehicle
目 录
摘要: I
ABSTRACT: II
1绪论 1
1.1引言 1
1.1.1智能循迹小车背景及发展历程 1
1.1.2国内外研究现状 2
1.2设计智能蓝牙循迹小车目的及意义 3
2系统方案设计 3
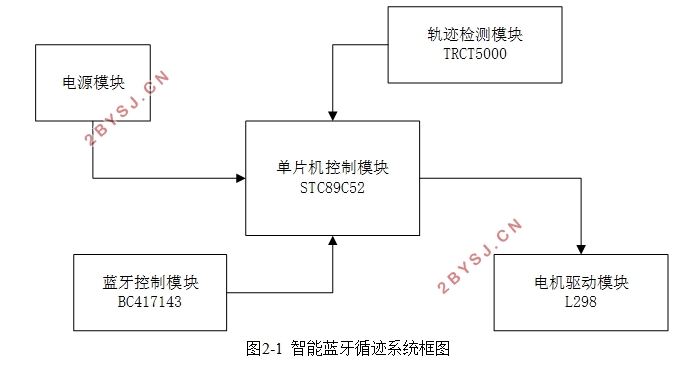
2.1智能蓝牙循迹小车基本原理 3
2.2系统总体方案设计 4
2.3具体方案选择 4
2.3.1车身选择 4
2.3.2主控制器选择 4
2.3.3轨迹检测模块选择 5
2.3.4电机驱动模块选择 5
2.3.5电机选择 5
2.3.6蓝牙控制模块 6
2.3.7电源模块选择 6
3系统硬件设计 6
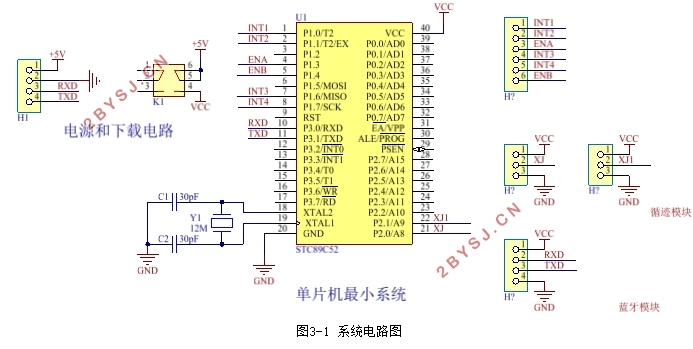
3.1系统总体电路设计 6
3.2单片机控制模块设计 7
3.2.1单片机模块功能介绍 7
3.2.2晶振电路 8
3.3蓝牙接口电路设计 8
3.4轨迹检测模块硬件设计 9
3.5电机驱动电路 10
3.5.1 L298N引脚结构 10
3.5.2 电机驱动原理 11
4系统软件设计 12
4.1程序设计软件介绍 12
4.1.1Keil软件介绍 12
4.1.2串口调试工具 12
4.2.程序流程图 12
4.3程序模块设计 13
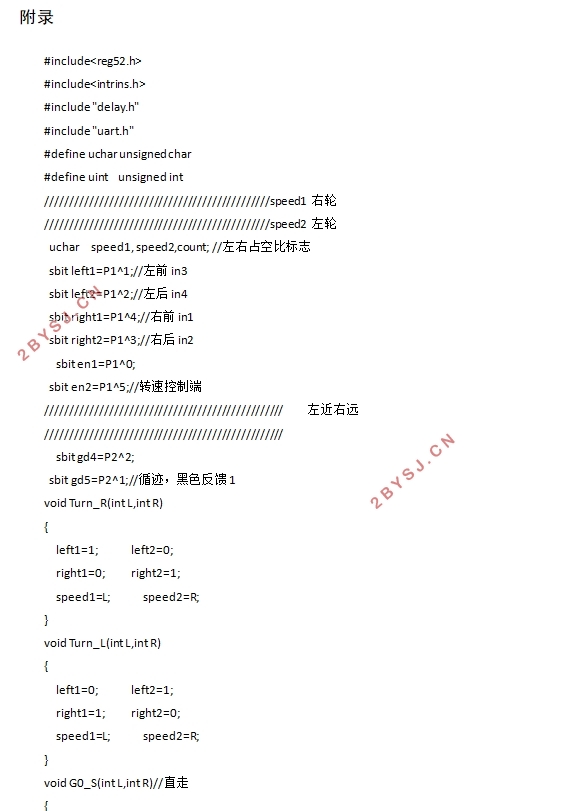
4.3.1电机驱动模块 13
4.3.2轨道检测模块程序设计 13
4.3.3蓝牙控制程序设计 14
4.3.4单片机串口程序设计 14
5系统调试 15
5.1系统硬件安装调试 15
5.2小车蓝牙模块连接调试 15
5.3小车运动测试 16
5.4小车循迹模式测试 16
6总结 17
参考文献 18
致谢 19