
基于单片机的智能小车的设计
无需注册登录,支付后按照提示操作即可获取该资料.
基于单片机的智能小车的设计(论文12000字)
摘要:以 STC89C52单片机作为核心芯片,并在此芯片上,与超声波传感器,红外探测器,电机驱动模块等一同组成了本次的设计整体。为了能够使小车的设计整体始终工作于最好的状态,并且充分体现设计小车的灵活运转程度,在设计中将单片机STC89C52的实时数据处理功能与定时器/计数器功能发挥到最大程度。当小车在预定的轨迹上行驶的时候,安装在智能车前端的红外探测模块的发射端与接收端通过红外信号的收发,使单片机控制芯片能够及时有效的分析小车的当前行进路径是否符合预定路线,并能依此信息向电机驱动模块下达指令让小车做出迅速适当的调整,以达到控制小车始终能够实现在预定路线上前进的效果。同样的,在判断小车的前进过程中的路况信息时,通过同样安置在小车前端的超声波测距模块反馈的信号,单片机便能够准确及时的甄别路况,并迅速及时地下达控制指令,调整小车,使小车能够正常安全的行驶。
在本次实验设计的最终阶段,进行了制作成品的调试,并且也进行了最终的实验测试。测试结果表明该设计智能小车已经能够实现预期设计的循迹避障的功能,实验结果已经符合预期效果,本次试验圆满完成。
关键词 :单片机 寻迹 避障 报警 电机驱动
Design of Intelligent Car Based on Single Chip Microcomputer
Abstract:The design of the main application STC89C52 as the control, and display driver integrated circuits and other systems. Based on single chip design. MCU STC89C52 using the controller as an alarm device that can give full play to STC89C52 of data processing and real-time control functions. Make the system work in the best condition,improve the system sensitivity. When two signal driven forward by car tracing module, the infrared tube on whether to produce level signals through the black, return again according to requirement of design procedure of judgment for motor driver module, it controls the car turning back forward of running on the black line.In the obstacle avoidance module, the microcontroller through the detection of ultrasonic signals to determine the traffic conditions and timely feedback information to the drive module to control the car can bypass the obstacles normal forward.
Finally, the production and debugging of the physical samples were carried out, and the experimental tests were carried out. The test results showed that the intelligent car could realize the expected tracking obstacle function and the experimental results were in accordance with the expectation.
Key words: SCM, Tracing, Avoidance , Alarm device , Motor driver module

目录
摘要 1
前言 1
1 设计任务及方案 2
1.1 设计任务及要求 2
1.2 设计方案论证 2
1.2.1 控制器选择 2
1.2.2 电机驱动芯片的选择 3
2 系统硬件电路与实现 3
2.1 电源模块 4
2.2 红外检测循迹模块 4
2.2.1 循迹功能 6
2.2.2 悬崖急停功能 7
2.3 电机驱动模块 8
2.4 路况检测模块 9
2.4.1防撞报警功能 10
2.5数码管显示模块 11
3 系统软件设计与实现 12
3.1 整体程序的构架 13
3.2 电机驱动程序设计 14
3.3 小车循迹程序设计 14
3.4 小车防撞报警程序设计 15
3.5 数码管显示程序设计 16
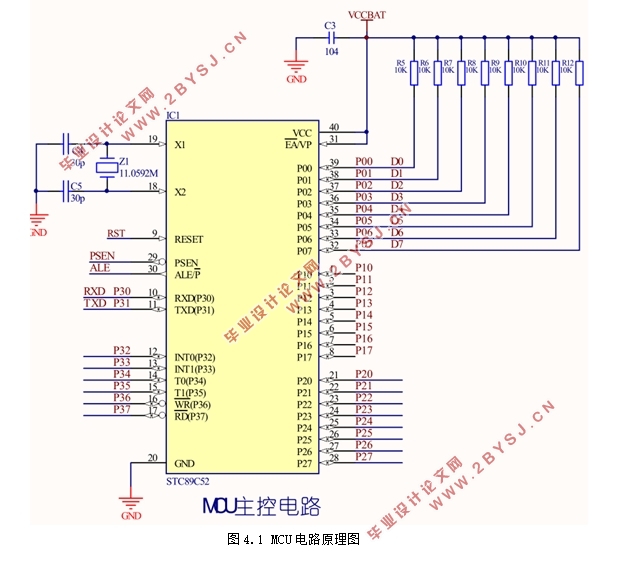
4 小车系统原理图 16
5 系统调试 17
5.1电机调试 17
5.2 循迹与避障功能调试 18
总结 20
参考文献 21
致谢 22
附录 23
作品摄像 23
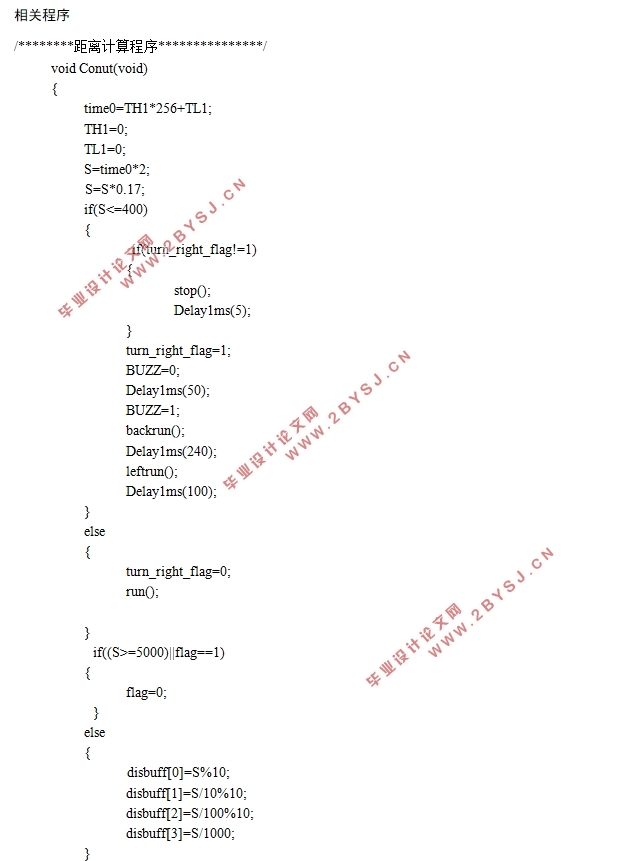
相关程序 24