
基于51单片机的语音智能导游观光小车设计(含原理图,电路图,程序)
无需注册登录,支付后按照提示操作即可获取该资料.
基于51单片机的语音智能导游观光小车设计(含原理图,电路图,程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文24800字,程序,答辩PPT)
摘 要
本文设计了一款以51单片机为控制核心的智能语音导游小车。该智能导游小车可直接运用于博物馆展览或者旅游观光解说之需要。系统利用定点检测技术给单片机传递地点信息,单片机并为此做出相关的处理,液晶显示器显示出展点名称,同时语音模块按指令播出相关的录音资料。播音完毕后,在此期间可以留适当的时间供游客观览展点。基于观光路线或者展馆展厅、展柜位置短期不变性,可直接在馆内设置路线及站点,小车全程按照设定的路线行进循迹行驶。让智能小车沿路线逐点介绍各景点,代替传统的人工介绍,可使馆内工作人员告别低效率的重复工作。从而解放出人手,使效率更高。
关键词:单片机;语音导游;液晶显示;循迹
Abstract
This paper designs a intelligent voice guide car that controlled by 51 single chip microcomputer. The intelligent voice guide car can be directly applied to the museum exhibition or tour commentary. This system gives location information to single-chip microcomputer by the fixed point detection technology, what’s more, microcomputer makes the related processing, liquid crystal display(LCD) shows the exposition point name, and voice module broadcasts recording information according to the instruction. After the broadcast, it’s time for tourists tour exhibition for right time. Base on tour route or short-term invariance of exhibition hall and storefront location, routes and stops can be directly installed in the museum, which makes the car according to the set path tracking during the whole journey. The smart car introduces the scenic spots along the route, instead of traditional artificial introduction, so the embassy staff can get rid of inefficient work. To liberate people, make more efficient.
Key words:Single chip microcomputer; Voice guide; Liquid crystal display (LCD); tracking
本文共分五章,具体内容安排如下:
第1章为绪论部分,概述基于51单片机的语音智能导游小车研究背景与研究意义,并对本文研究工作进行了介绍。
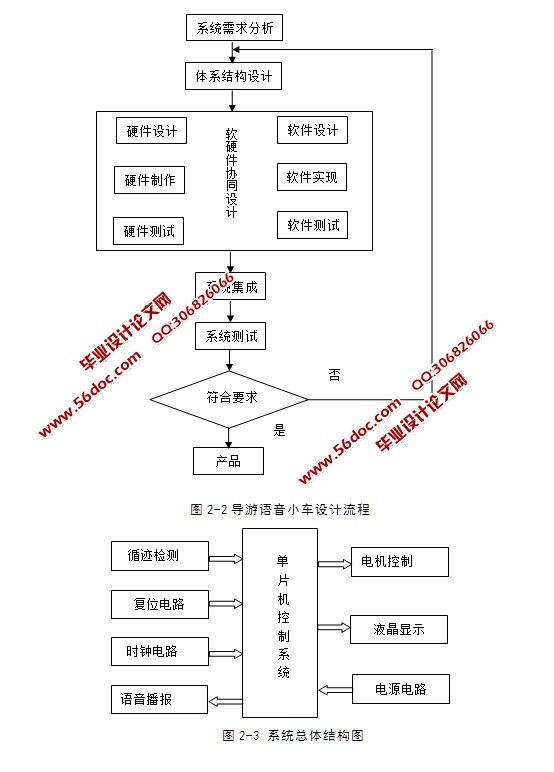
第2章为系统总体设计的介绍,在文中分别对系统组成,电路系统设计,机械结构设计,控制系统设计以及传感器选型做了概括性的阐述。
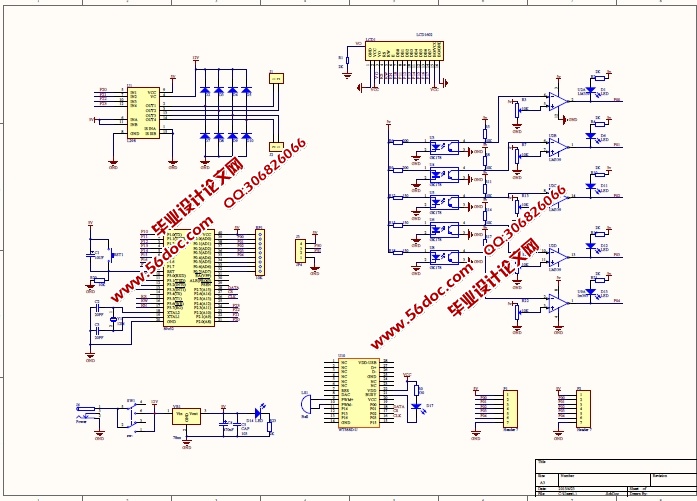
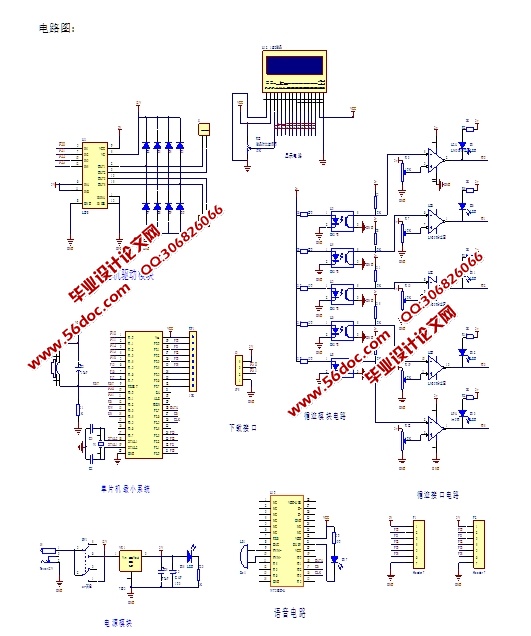
第3章从控制系统的角度详细说明了机器人的硬件组成,并阐述了控制系统的硬件电路的设计原理。
第4章系统软件设计,说明系统的软件开发环境,Protel电路图的绘制方法,给出系统运行的主要程序流程图。
第5章进行系统的软硬件调试方法以及遇到问题的解决办法。
第2章 导游小车的总体设计
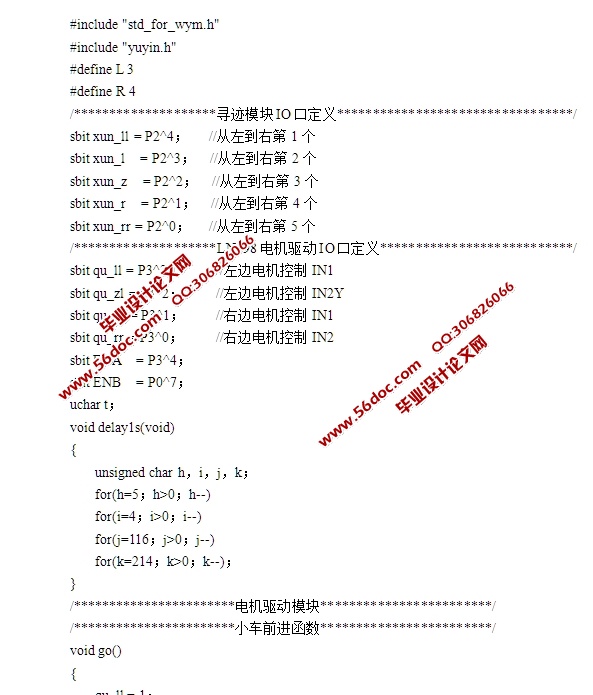
2.1 系统的组成
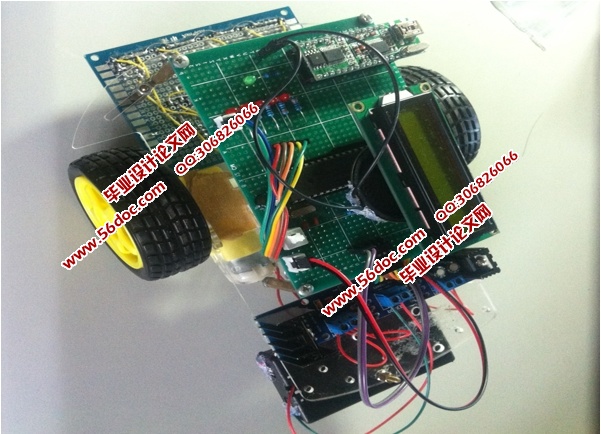
在导游小车结构设计方面,目前世界上的这类服务导游小车,运动装置主要有轮式、双足式、履带式三种结构。导游小车工作在结构化环境下,路面平整,轮式结构具有很大优势。一方面它可以保持机器人的低重心,这令机器人行走时比双足式结构稳定。
导游小车需要能够自主的引导参观者在场地内活动,这就要求其除了具有基本的语言交流功能,还需要具有环境地图,可根据当前位置和目标地点进行路径规划,能躲避场馆内行人,同时,场馆的工作人员需要实时监控机器人的工作情况并能在特殊情况下对机器人进行主动的行为干预。根据导游机器人的功能需要,经分析得到所设计的机器人需要具有如下具体功能:
1)音频的播放功能
导游小车语音模块按指令定点播出相关的录音资料。
2)液晶显示功能
利用定点检测技术给单片机传递地点信息。单片机并为此做出相关的处理,液晶显示器显示出展点名称。
3)导游小车路径规划
导游小车在引领参观时,基于观光路线或者展馆展厅、展柜位置短期不变性,可直接在馆内设置路线及站点,小车全程按照设定的路线行进循迹行驶。
4)定点播报
播音完毕后,在此期间可以留适当的时间供游客观览展点。
让智能小车沿路线逐点介绍各景点,代替传统的人工介绍,可使馆内工作人员告别低效率的重复工作。
目 录
第1章 概述 1
1.1 课题研究背景意义 1
1.2 智能小车的国内外研究现状 2
1.3 本文研究内容 4
第2章 导游小车的总体设计 6
2.1 系统的组成 6
2.2 系统的设计思路 7
2.3 系统的总体框图 8
2.4 本章小结 9
第3章 语音智能导游小车硬件设计 10
3.1 系统控制电路设计 10
3.2 语音导游播报电路设计 16
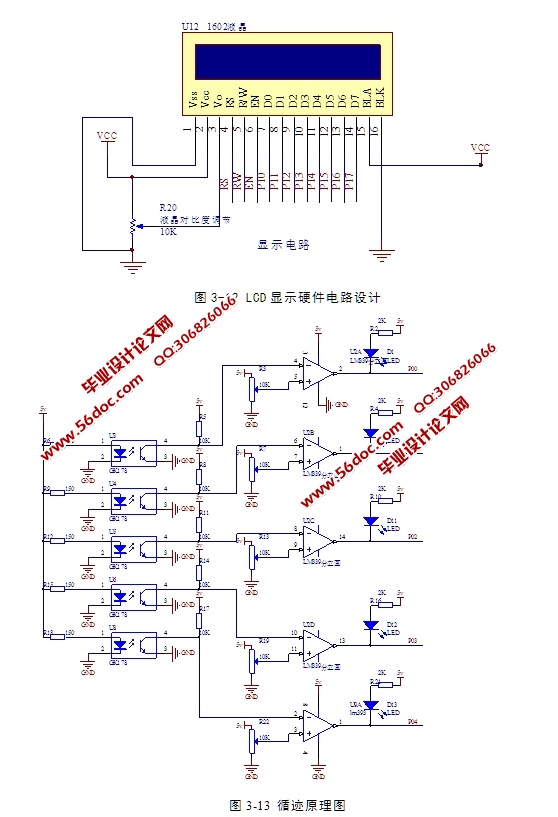
3.3 展点显示电路设计 19
3.4 循迹电路设计 23
3.5 小车驱动电路设计 24
3.6 电源电路设计 29
3.7 本章小结 29
第4章 软件设计 29
4.1 系统的软件编程环境 30
4.2 系统电路图绘制环境 35
4.3 显示子程序设计 38
4.4 系统工作的主要流程 40
4.5. 本章小结 41
第5章 系统调试与故障分析 42
5.1 软件程序调试 42
5.2 硬件电路调试 42
5.3系统联调 43
5.4本章小结 43
结论 44
参考文献 45
致谢 46
附录一 47
附录二 49