
基于单片机的智能台灯设计(含仿真原理图,程序)
无需注册登录,支付后按照提示操作即可获取该资料.
基于单片机的智能台灯设计(含仿真原理图,程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文15000字,程序,答辩PPT)
摘 要
本文以实现最大程度为人们服务和节约用电为目的,设计可以人脸识别,自动跟踪人脸的智能台灯控制系统。智能系统包括:摄像头模块,上位机,通信电路,ATmega 2560单片机,舵机模块,灯泡。摄像头模块用来采集人脸信息;上位机对采集到信息进行处理并发送个下位机(ATmega2560);通信电路是上位机和下位机通信的桥梁;下位机根据接收到的数据,向舵机模块发出命令;舵机模块是控制系统的执行机构,用于调节台灯位置。
上位机软件设计采用线性变换的方法,对采集到的人脸信息进行分析处理,实现了对人脸位置的准确定位,保证了上位机和下位机通信内容的准确性。下位机软件设计采用了映射的方法,实现了将接收到的人脸位置信息转换成舵机的转动角度,保证了执行机构的准确动作。最后,通过硬件电路实现了上位机与下位机的通信。
关键词:智能台灯;ATmega 2560;舵机模块
Abstract
In order to achieve the greatest degree for the people and for the purpose of saving electricity, face recognition is designed in the paper, automatic face racking intelligent lamp control system. The intelligent system including: camera module; upper computer;
communication circuits; ATmega2560 MCU; servo module; lamp.The camera module is
used to collect information on human faces; The upper computer will process the
collected information and send it to the lower computer(ATmega2560); communication
circuits are the bridges of communication of the upper and lower computers; according to the received data, lower computer sends commands to the servo module; servo
module is the actuator of the system and it is used to adjust the position of the lamp.
The design of the upper computer software uses linear transformation method to analyze and process the collected face information that achieves the accurate position of
the human face and ensure the accuracy content of upper and lower computers’ communication. The design of lower computer software uses mapping method and achieves that the received position of face information is transformed into the rotation of the servos,ensuring the accuracy actions of the executive body. Finally, it is achieved the communication of upper and lower computers by hardware circuits.
Key words: intelligent lamp; ATmega2560; servo module
1.3 本文研究的主要内容
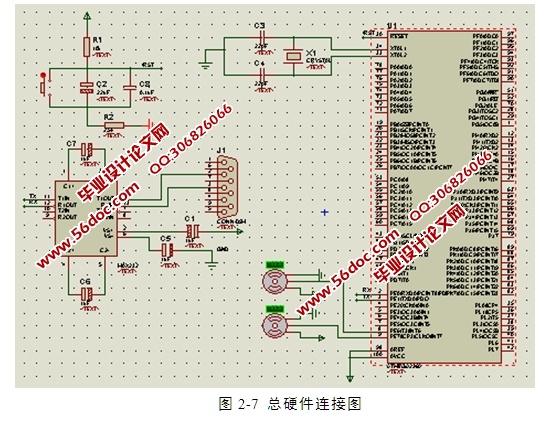
智能台灯是ATmega2560单片机并结合电机模块、摄像头模块等模块组成的,但是这个系统只做下位机对台灯的控制,以及对控制台灯的软件设计。台灯的主控制芯片是ATmega2560,ATmega2560芯片是通过它发出的信号来控制两个舵机的转动角度来实现对台灯的控制作用的。一个舵机控制台灯的上下移动角度,另一个舵机控制台灯的左右转动角度,其中每一个方向的最大转动角度为180度,这样可以实现大范围的控制台灯的自由转动。当单片机接收到上位机传来人的位置信号时,它会与台灯的当前位置作比较,并发出相应的信号,舵机根据信号做出相应的动作。
1.4 本论文的章节安排
本论文的第一章介绍了智能台灯的背景以及发展前景,在接下来的章节中将会讲述智能台灯控制系统的硬件组成以及对各个硬件模块的介绍。介绍完硬件将介绍下位机软件开发平台,讲述开发软件的使用方法并进行软件的开发。介绍完上位机后,紧接着介绍下位机软件的安装和配置,进而完成上位机软件的开发,最后将上位机和下位机成功的连接到一起,实现人脸的识别和上位机与下位机的通信。
智能台灯系统的功能和硬件设计
2.1 智能台灯系统的功能
智能台灯功能自然是为人们照明,不过它可以根据所识别的人脸的位置跟踪人脸,实现最大程度的为人们服务。
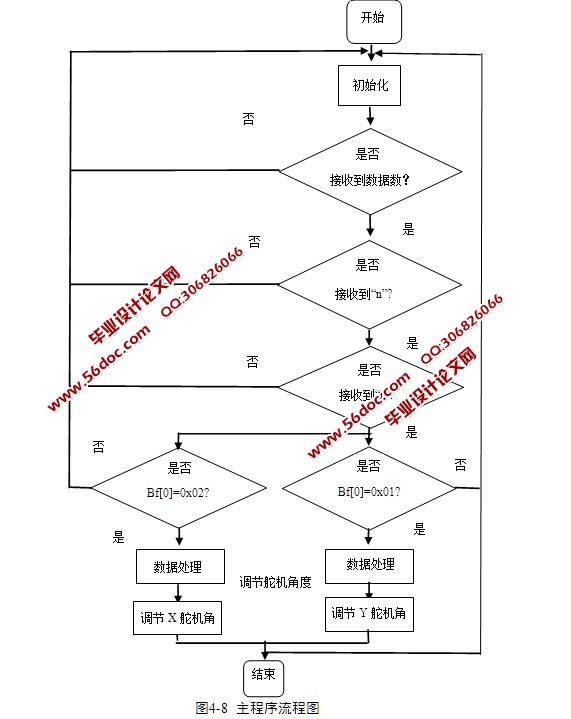
智能台灯系统软件中,台灯在二维坐标轴中的初始坐标值为x=0,y=0,当台灯下的人有所移动时,摄像头模块将会从新采集到人脸的位置,确定人在二维坐标轴的坐标值xn,yn,上位机采集到xn,yn后,通过串口通信,将新的坐标值发送到单片机,单片机将接收到xn,yn的值与x,y的初值作比较,从而确定两组数据的差值xe,ye,根据xe,ye的正负和大小,从而确定台灯应该向哪个方向转动和转动的角度。然后,单片机将发出执行命令,从而控制电机向正确的方向转动相应的角度。其中,电机可以向左右上下转动的最大角度为90°,当人的活动范围超出90°时,软件设置台灯会自动扫视,检查是否有人出现。
2.2 智能台灯系统的硬件设计
2.2.1 智能台灯系统摄像头模块的设计
智能台灯系统中所用的摄像头模块是OV7670 CAMERACHIPTM图像传感器,OV7670 (彩色,无铅) 有24 pin ,体积小、工作电压低,提供单片VGA摄像头和影像处理器的所有功能。通过SCCB总线控制,可以输出整帧、子采样、取窗口等方式的各种分辨率8位影响数据。该产品VGA图像最高达到30帧/秒。用户可以完全控制图像质量、数据格式和传输方式。所有图像处理功能过程包括伽玛曲线、白平衡、饱和度、色度等都可以通过SCCB接口编程。OmmiVision图像传感器应用独有的传感器技术,通过减少或消除光学或电子缺陷如固定图案噪声、托尾、浮散等,提高图像质量,得到清晰的稳定的彩色图像。
目 录
第1章 概述 1
1.1 课题研究的背景及意义 1
1.2 智能台灯的国内外发展概况 2
1.3 本文研究的主要内容 2
1.4 本论文的章节安排 3
第2章 智能台灯系统的功能和硬件设计 4
2.1 智能台灯系统的功能 4
2.2 智能台灯系统的硬件设计 4
2.3 系统总硬件连接图 11
2.4 本章小结 11
第3章 上位机软件的开发 12
3.1 上位机软件的简介 12
3.2 智能台灯系统上位机软件的配置 13
3.3 上位机软件设计 15
3.4 本章小结 16
第4章 下位机Arduino软件的开发 17
4.1 下位机软件平台的选择 17
4.2 下位机软件Arduino环境的概述 17
4.3 Arduino软件和驱动的安装 17
4.4 下位机软件的设计 21
4.5 上位机与下位机的连接的实现 23
4.6 本章小结 23
结 论 25
参考文献 26
致 谢 27
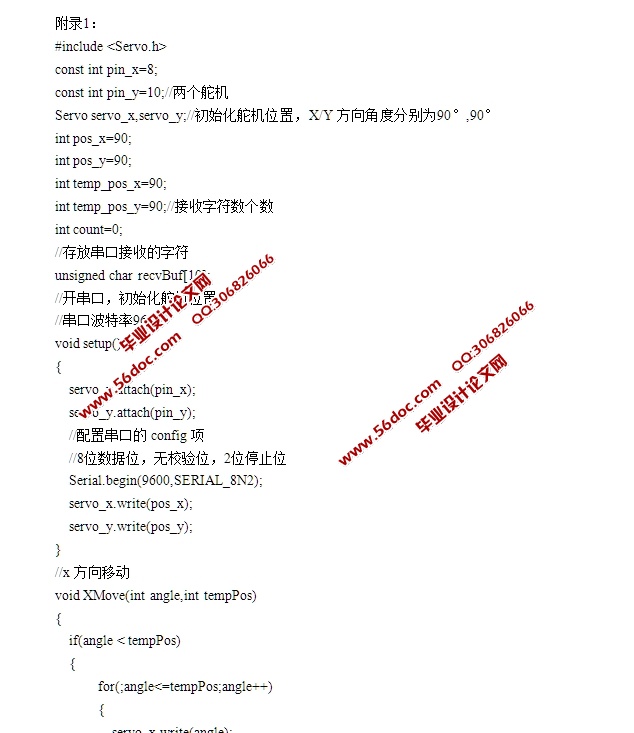
附 录 28