混合位置/力控制SCORBOT-ER4支机械手与神经网络的非线性补偿
以下是资料介绍,如需要完整的请充值下载. 本资料已审核过,确保内容和网页里介绍一致. 密 惠
无需注册登录,支付后按照提示操作即可获取该资料.
无需注册登录,支付后按照提示操作即可获取该资料.
资料介绍:
混合位置/力控制SCORBOT-ER4支机械手与神经网络的非线性补偿(中文4200字,英文PDF)
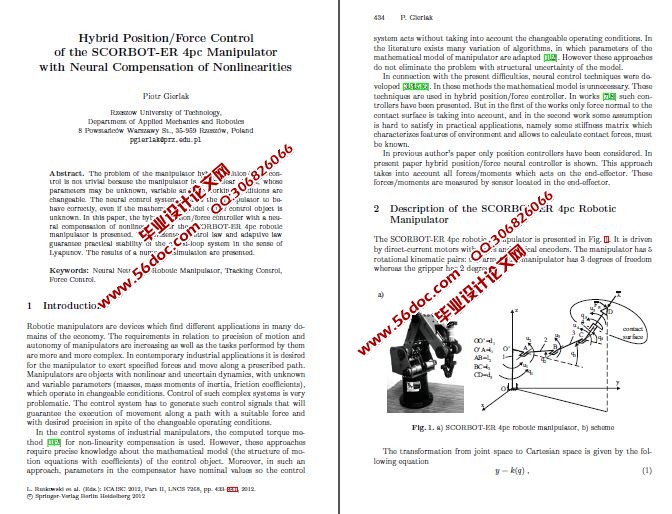
摘要。机械手的混合位置/力控制的问题,机械手是不平凡的,因为是一个非线性的对象,其参数可能是未知的,变量和工作条件多变。神经网络控制系统,使机械手的行为正确,即使在控制对象的数学模型是未知的。在本文中,混合位置/力控制与神经的SCORBOT-ER4PC机器人的非线性补偿操纵器呈现。所提出的控制律和自适应律保证在意义上的实际的闭环系统稳定李雅普诺夫。进行了数值模拟的结果。
关键词:神经网络,机器手,跟踪控制,力控制。