
高精度三轴运动平台设计及控制(5kg负载)(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
高精度三轴运动平台设计及控制(5kg负载)(含CAD零件图装配图)(论文说明书13000字,CAD图7张)
摘 要
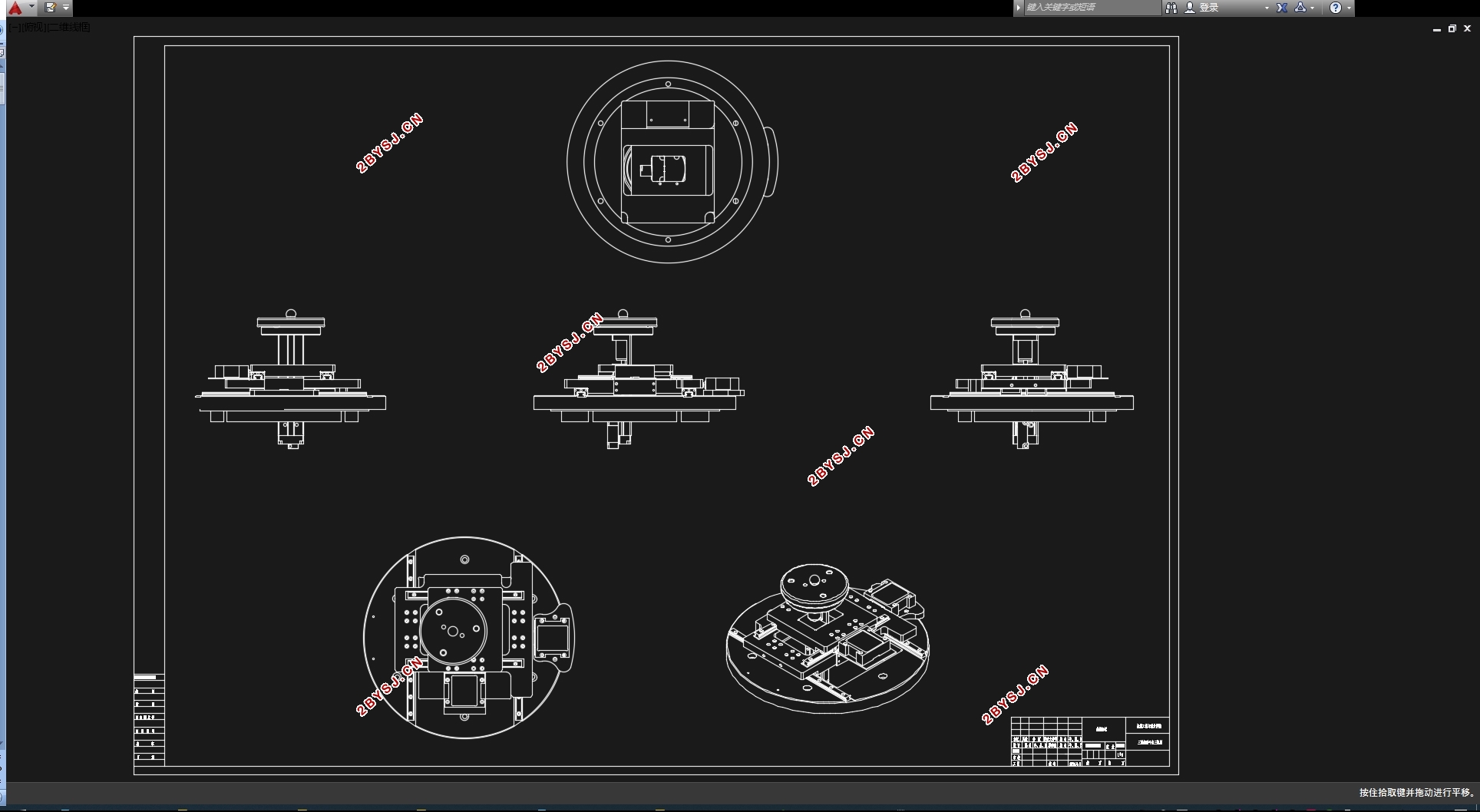
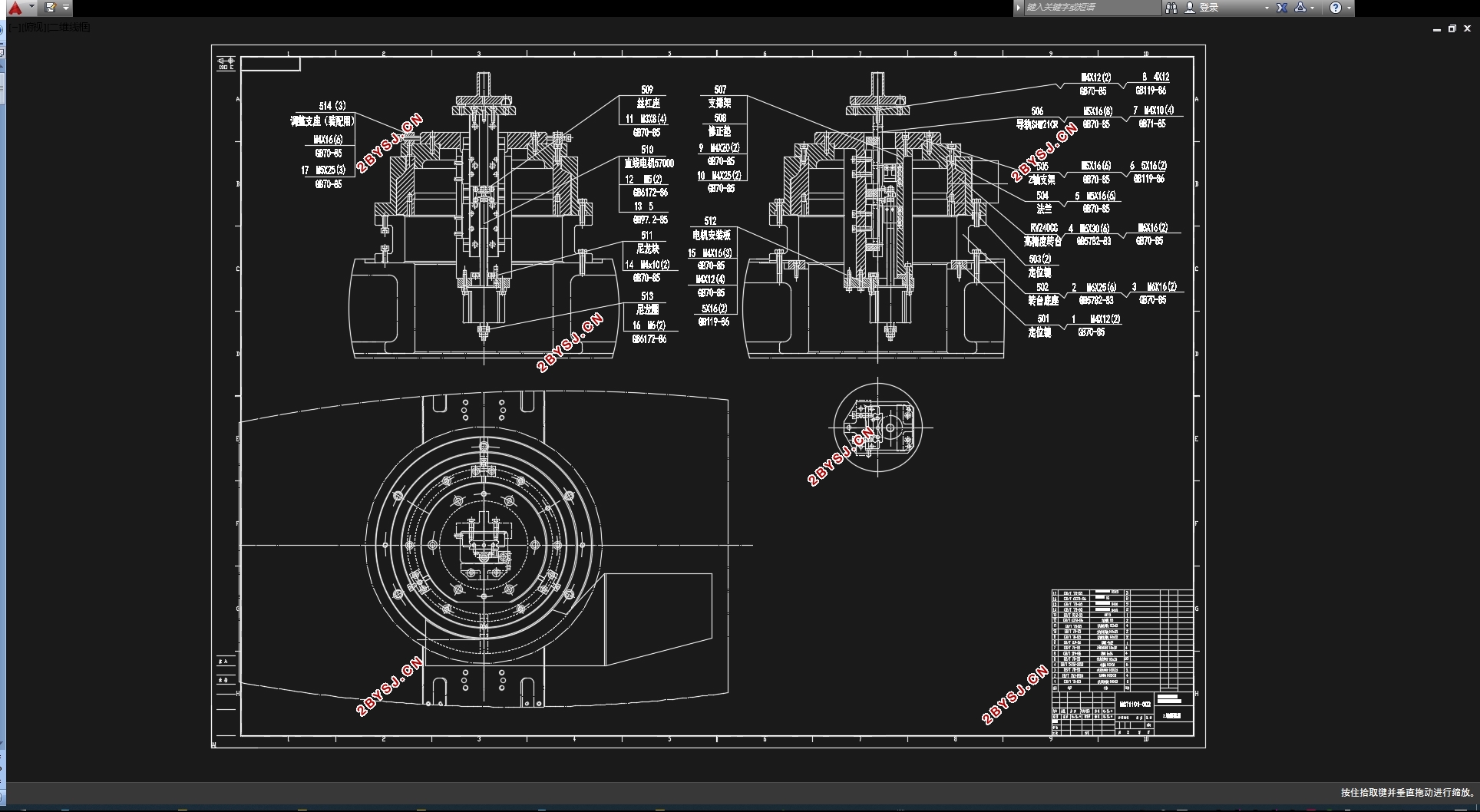
三轴联动精密工作平台是激光显微镜机械系统中的载物的枢纽部件。工作平台选用多层式结构,用压电陶瓷直线电机作为驱动,是由双对称滚珠直线导轨带动两托盘在x、y两方向上微位移精密运动;以伺服电机和滚珠丝杆组合带动载物板在z轴方向上运动。精密工作平台基本工作要求是运用在医用激光显微镜的载物平台,显微镜要求被测的小直径实物能快速精确地运动到显微镜视野内。XY平面的联动实现了高精度直线插补,运动速度在2mm/s以下,最小移动速度为1um/s,其负载在2kg以下,运动有效范围在140×60mm内。Z轴向上实现竖直方向的运动,需要一定的负载和保持能力,运动范围为30mm。研究了影响工作台精度的主要原因,通过误差的分析与测量建立了误差补偿模型。最后验证证明,通过了误差补偿工作台达到了更高的定位精度,达成了平台的设计目标
关键词:精密工作台;压电陶瓷电机;分步对角线测量;误差补偿
High-precision Three-axis Motion Platform Design and Control (5kg load)
Abstract
Three-axis precision work platform is a key component of a laser microscope mechanical loading of the system.Working platform with multi-layered structure to the piezoelectric ceramic linear motor as the drive by double symmetrical ball linear guide driven on two pallets x, y precision micro-displacement movement in both directions;A servo motor and ball screw drive with loading plate motion in the zdirection.The basic job requirements precision work platform is used in medical laser microscope carrier platform, microscopes require a small diameter physical movement can be measured quickly and accurately to the microscopic field.
High precision XY plane linkage linear interpolation, the movement speed of 2mm / s or less, and the minimum movement speed of 1um / s, the load 2kg or less, in the effective range of motion 140 × 60mm. Z achieve up ward vertical movement requires a certain load and retention, range of motion is 30mm. Effects of the main reasons work bench accuracy, error analysis and measurement error compensation model is established. Finally verification proved by the error compensation table to achieve a higher positioning accuracy, reached the design goal of the platform.
Keywords: Precision workstations; piezoelectric ceramic motors; step diagonal measurement; error compensation

目录
摘 要 I
Abstract II
第一章 绪论 1
1.1 研究目的和意义 1
1.2 研究目标及内容 1
1.3工作台的整体结构设计 2
1.4 课题的研究思路与方法、技术路线、试验方案及其可行性分析 2
1.4.1 运动平台的传动方案 2
1.4.2运动平台的结构方案 3
1.4.3 运动平台的通信模块 3
第二章 工作台的设计 5
2.1 工作台的机械结构设计 5
2.2驱动控制部分结构设计 8
2.2.1驱动器 8
2.2.2运动控制卡 9
2.2.3看门狗电路 12
2.2.4压电陶瓷电机 13
2.3伺服平台的建立 15
2.3.1伺服平台的运动研究 16
2.3.2平台机构优化设计 18
第三章:精密工作台的实验测试与结果分析 21
3.1误差的理论分析 21
3.2误差测量与分析 24
3.3误差补偿 24
第四章 结论 27
参考文献 28
致谢 30