
中小型冲床自动送料机械手设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
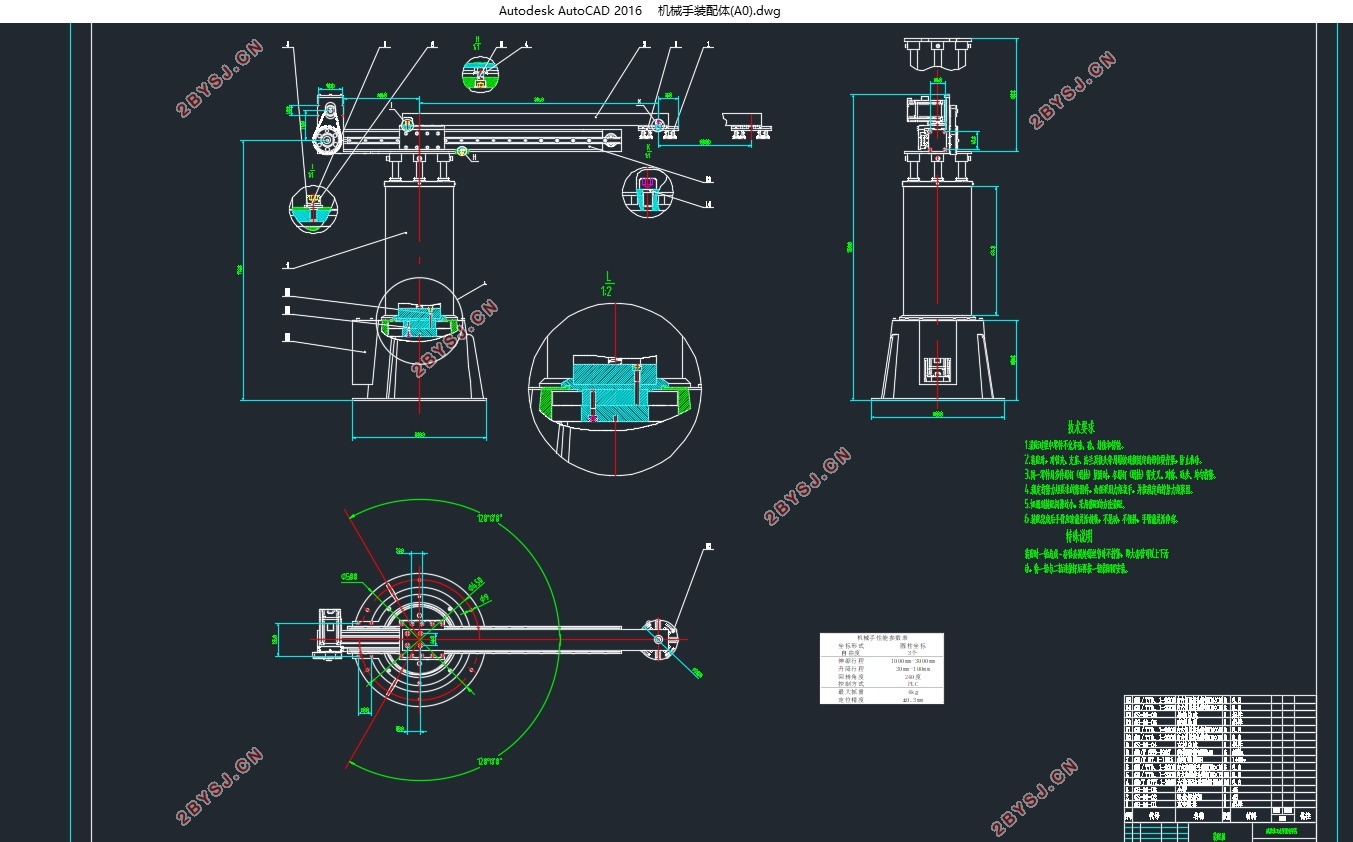
中小型冲床自动送料机械手设计(含CAD零件图装配图)(任务书,开题报告,论文说明书11000字,CAD图12张)
设计要求
主要任务:
1. 设计冲床上下料机械手的机械机构,完成装配图和零件图的绘制;
2. 查阅至少15篇的相关资料,其中外文文献至少3篇,并且完成开题报告;
3. 完成至少5000汉字与选题相关的外文文献翻译;
4. 完成毕业设计说明书一份(字数不得低于10000汉字);
5. 完成结构设计图纸,完成控制系统设计。
设计参数及要求:
送料行程:1000-3000mm
升降行程:30-100mm
最大负载:4kg
自由度数:3个自由度
坐标型式:圆柱坐标型
运转周期:大于每分钟10次
送料精度:±0.3mm
工件抓取方式:真空吸附
1.1.3 控制系统
控制系统就是控制机械手的各种运动的系统。目前的组成一般有两种,一种是程序控制系统,而另一种是电气定位系统。控制方式常见的有以下两种:点位控制、连续轨迹控制。
1.2规格参数
(1)自由度:3
(2)坐标形式:圆柱坐标
(3)驱动方式:电动
(4)小臂伸缩行程:2000mm
(5)大臂升降行程:100mm
(6)回转范围:240度
(7)定位精度:±0.3mm
(8)驱动源:伺服电机
(9)控制系统:PLC
目录
第1章绪论 1
1.1 工业机械手的基本组成 1
1.1.1 执行机构 2
1.1.2 驱动系统 3
1.1.3 控制系统 4
1.2规格参数 4
1.3工业机械手的技术发展 4
1.4冲压自动化生产线研究现状 5
1.5设计要求 6
主要任务 6
第2章自动送料机械手方案设计 7
2.1总体方案设计 7
2.2执行部分的选择 7
2.2.1手部 7
2.2.2腕部 7
2.2.3臂部 7
2.3驱动部分的选择 8
2.3.1气压传动 8
2.3.2液压传动 8
2.3.3机械驱动 8
2.3.4电机驱动 8
2.4 控制方案的确定 8
2.5 机械手的基本形式选择 9
2.6 机械手主要部件及运动 9
第3章手腕部分的设计 10
3.1真空吸盘气压系统的工作原理 10
3.2相关气动元件型号选择 10
3.3本章小结 11
第4章手臂伸缩部分的设计 13
4.1传动同步带的设计 13
4.2 伺服电机与传动带轮的设计 13
4.2.1计算折算到电机轴上的转动惯量 13
4.2.2计算电机驱动负载所需要的扭矩 13
4.2.3计算电机所需转速 13
4.3 本章小结 14
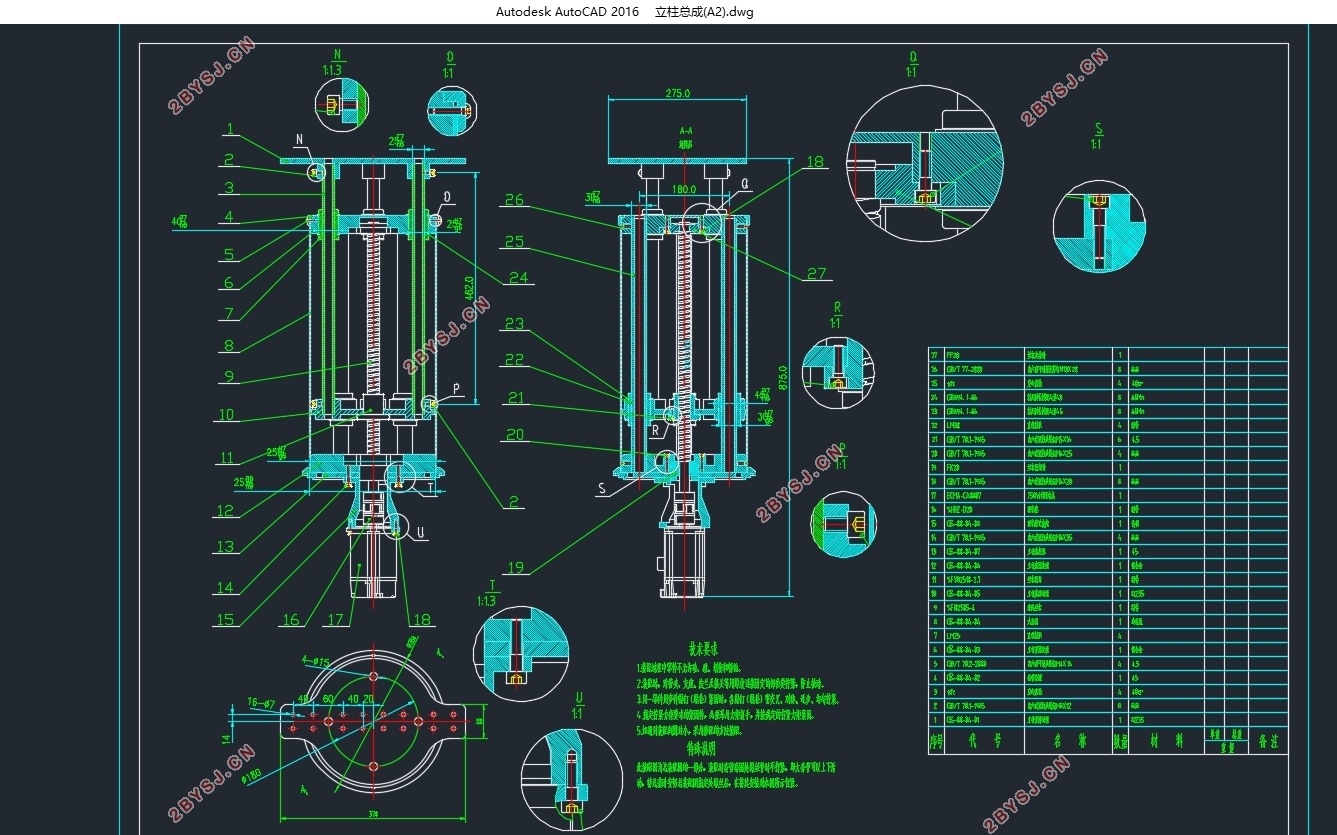
第5章手臂升降部分的设计 15
5.1 滚珠丝杠的选择 15
5.1.1容许轴向负荷计算 15
5.1.2基本动额定负荷计算 16
5.1.3基本静额定负荷计算 17
5.2 伺服电机的选择 17
5.2.1惯性矩 17
5.2.2驱动扭矩的计算 17
5.3 光轴与直线轴承的选择 18
5.4本章小结 19
第6章机械手控制系统设计 20
6.1 机械手的工艺过程 20
6.2 PLC控制伺服电机范例 21
第七章 总结 24
参考文献 25
致 谢 27