
管道清扫机器人的设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
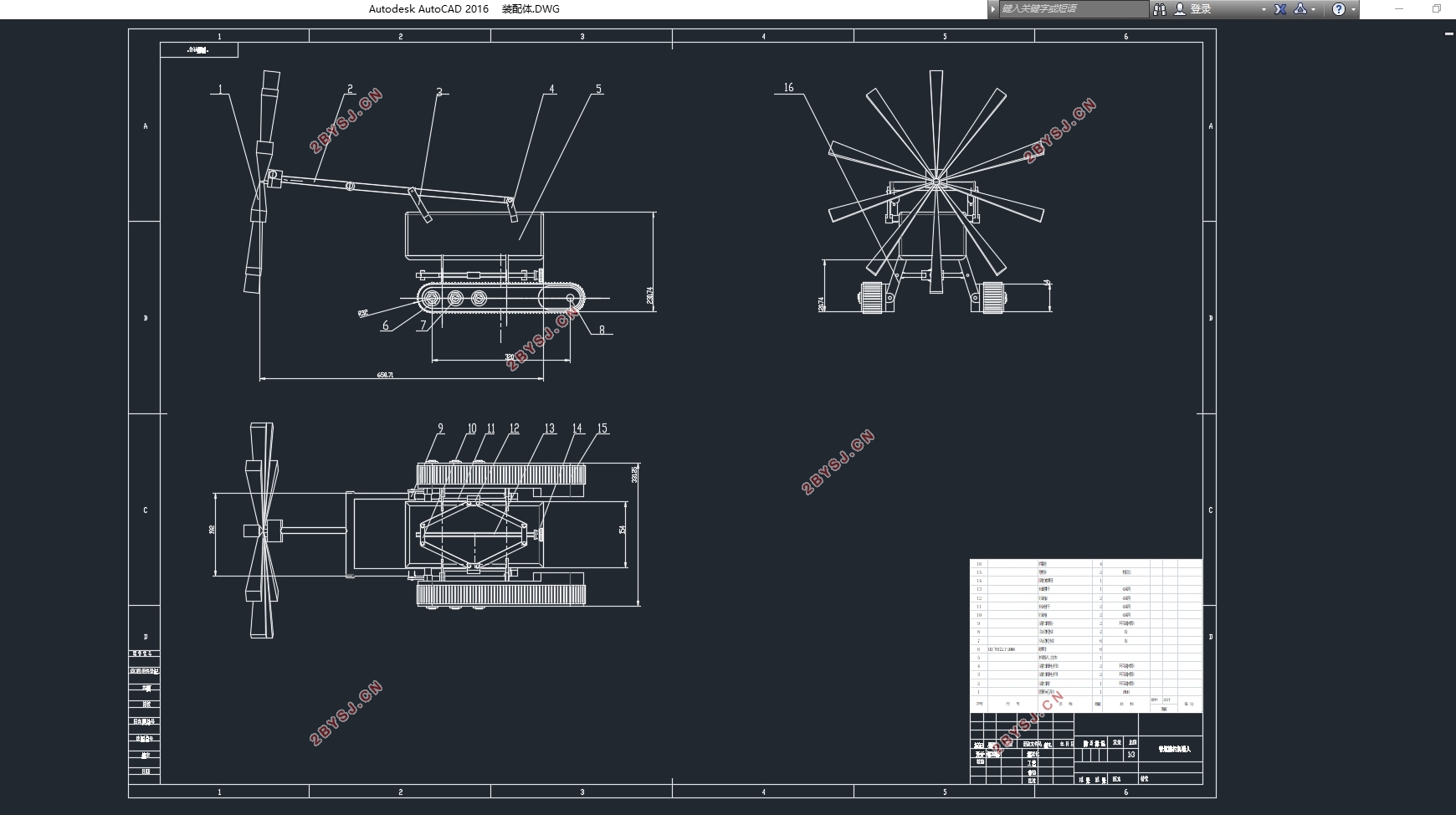
管道清扫机器人的设计(含CAD零件图装配图)(任务书,开题报告,论文说明书13000字,CAD图纸4张)
机器人主要参数设定
本文所研究的管道机器人技术参数如下:
(1)清扫管道尺寸范围:矩形管道:宽 300~800×高 250~450(mm);圆形管道:直径 250~500(mm);
(2)机器人自身重量:15 kg;
(3)一次性工作行程:≥30 m;
(4)工作时行走速度范围:0~20 m/min,并能实现速度的调节;
(5)控制方式:电缆线连接机器人传输信息;
(6)电缆线长度:50 m;
(7)外接电源:220 AC;
(8)工作时间:≥8 小时(连续工作)。

目 录
摘 要 II
Abstract II
第1章绪论 1
1.1研究目的及意义 1
1.2管道清扫机器人国内外发展概况 1
1.2.1国外发展概况 1
1.2.2国内管道清扫机器人的研究现状 2
1.2.3国内管道清扫机器人存在的问题 4
1.3研究内容 4
第二章 管道清扫机器人的总体结构设计 6
2.1机器人的总体设计方案 6
2.1.1清扫机器人的结构组成 6
2.1.2 机器人主要参数设定 7
2.2机器人的工作原理 7
2.3机器人的移动机构设计 8
2.3.1移动方式的选择 8
2.3.2履带和履带轮的设计及选用 9
2.3.3驱动方式的确定 12
2.3.4驱动电机的选择 13
2.4机器人的清扫机构设计 14
2.4.1清洗臂举升机构的设计 14
2.4.2清洗刷机构设计 15
2.5机器人照明和检测装置 17
2.6本章小结 18
第3章机器人自适应型装置设计 18
3.1履带足变位装置 18
3.2刷头更换装置 22
3.3本章小结 24
第4章机器人工作时的受力分析 25
4.1机器人移动装置力学分析 25
第5章控制系统总体结构设计 27
4.1 Atmega64主控芯片介绍 27
第6章基于ADAMS机器人动力学仿真研究 29
6.1基于ADAMS仿真前准备 29
6.2仿真后结果分析 31
第7章总结与展望 34
参考文献 34
致 谢 35