
蛋箱搬运机器人运机器手的设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
蛋箱搬运机器人运机器手的设计(含CAD零件图装配图)(论文说明书13000字,CAD图8张)
总体方案设计
2.1 数据参考
本题目将设计蛋箱搬运机器手。从国内现在的养殖行业来看,国内的蛋场还没有形成规模化和机械化,自动化率也很低。蛋箱主要靠人工来搬运,而且蛋本身结构易碎,必须轻拿轻放。所以这就需要大量的人力劳动力。但是生产效率依旧较低。由于行业存在上述问题,所以我想设计一种蛋箱搬运机械手。
设计参数参考:
搬运的蛋箱:参考网上转运蛋箱的常规尺寸:3000mm*600mm*150mm;
最大搬运重量:500kg;
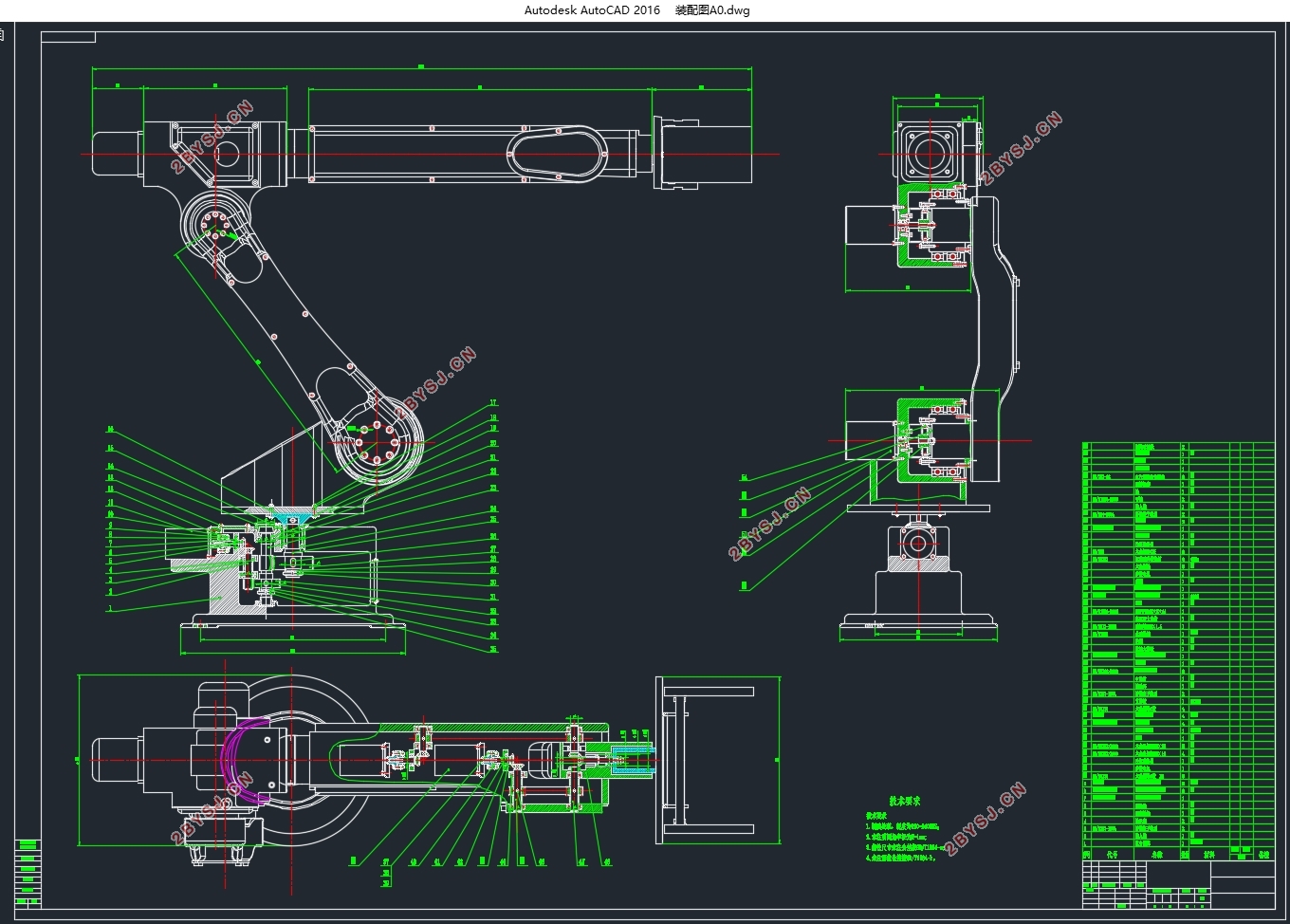
2.3 结构与传动原理
底座部分:机械臂的底座包含传动部件、电机、轴承等,底座主要的作用是用来支撑机械臂和转动大臂,还用来承受机械手的全部重量和搬运物件的载荷。所以底座要有足够的重量和强度。另外底座还需要足够大的放置底面,用来保证机械臂的平稳运动。
手臂部分:手臂部分通过包括驱动手臂运动的部件,比如油缸,齿轮齿条等传动机构。还包括大臂和小臂。大臂就是指转动大臂和齿轮传动的部件。小臂是指包括小臂、同步传动轴等等。小臂后还有手腕部分,手腕部分包括传动齿轮等。
2.4 总体方案设计
为了实现搬运机械臂的空间三方向旋转运动,我们采用以下结构形式。此种结构运动灵活,结构紧凑,占地面积小。此种结构相对机械手本体,有着较大的运动空间。此种结构广泛运用于焊接、搬运、组装等领域。

目录
摘要 1
ABSTRACT 2
一、绪论 4
1.1 引言 4
1.2国内外研究现状 4
1.3本文研究的主要内容 5
二、总体方案设计 6
2.1 数据参考 6
2.2、总方案论述 6
2.3 结构与传动原理 7
2.4 总体方案设计 7
三 搬运机器人大臂的结构设计 8
3.1 设计基本要求 8
3.2 机构设计 8
3.3 驱动系统选型 9
3.4 承载能力计算 9
四、搬运机器人末端结构设计 12
4.1 结构设计与校核 12
4.2 计算分析 20
4.3 传动轴的设计 21
五、机身结构的设计 24
5.1 齿轮设计 24
5.2 轴的设计 27
5.3 轴承校核 34
六、总结 39
七、致谢 40
八、参考文献 41