
三关节机械臂设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
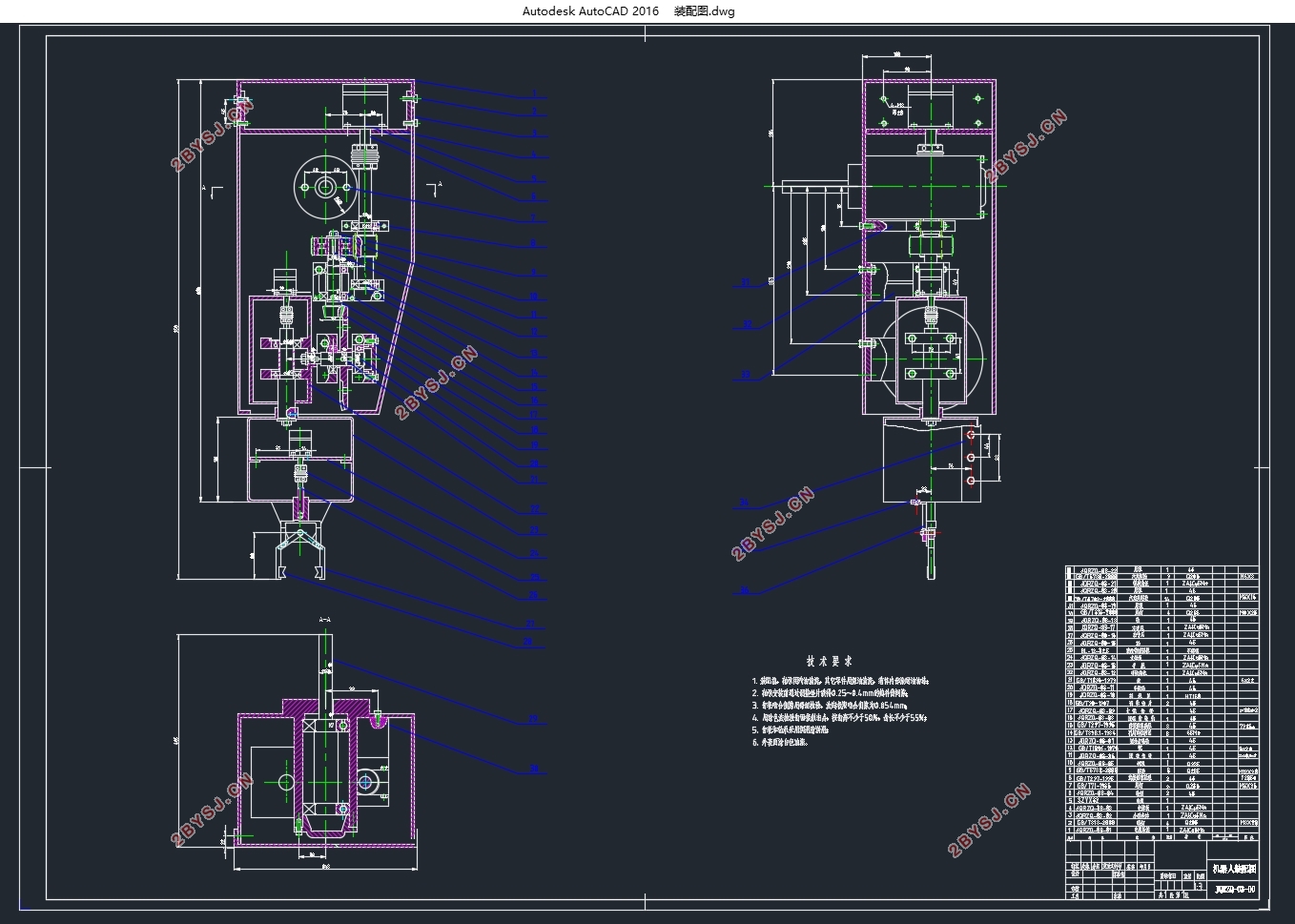
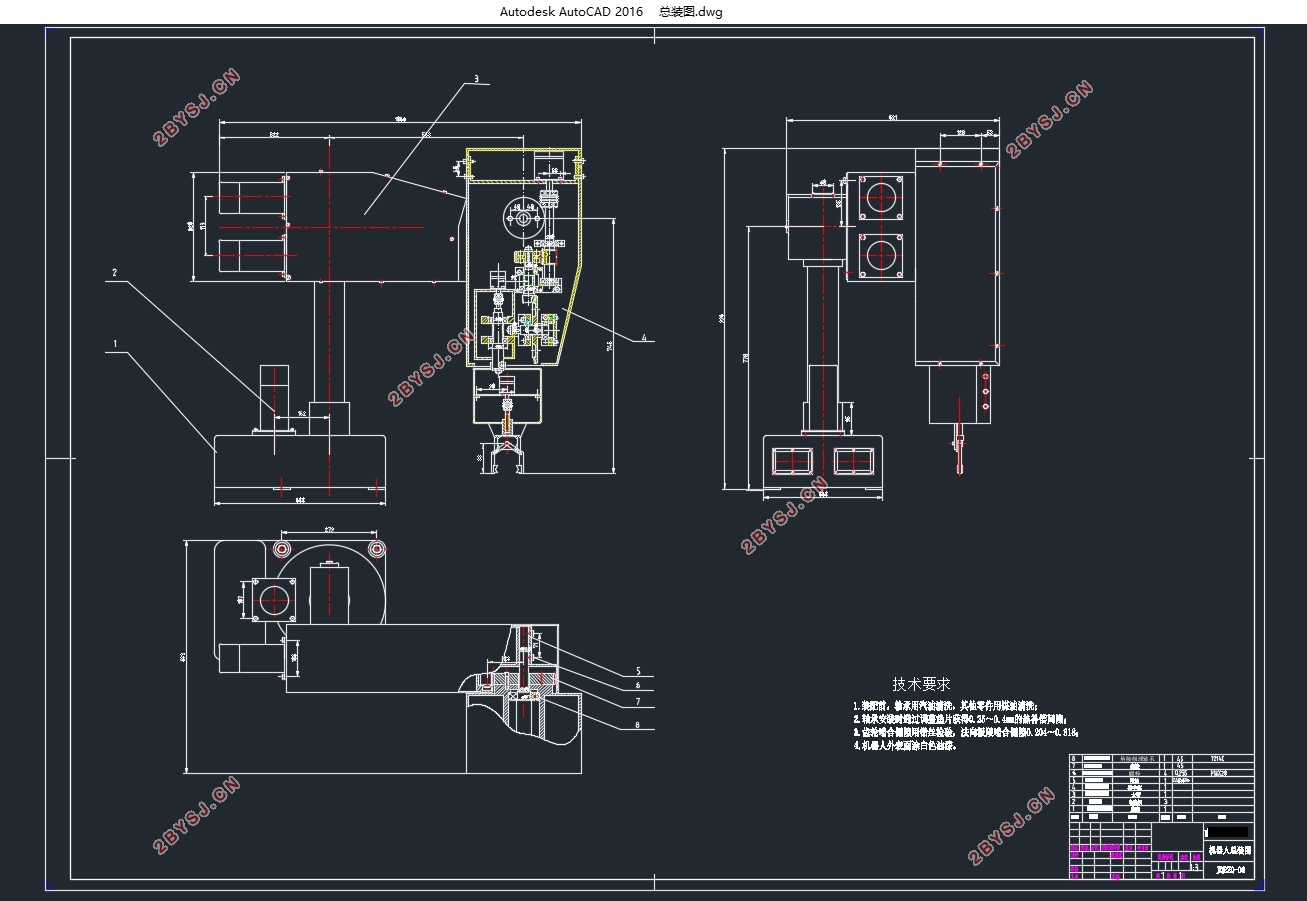
三关节机械臂设计(含CAD零件图装配图)(论文说明书17000字,CAD图8张)
本课题设计的是垂直多关节型机器人臂部与手部的设计,主要是臂部和腕部的结构设计及其零件设计。此课题来源于生产实际,是针对目前手工电弧焊接效率低,操作环境差,而且对操作员技术熟练程度要求高,因此采用机器人技术,可以实现焊接生产操作的柔性自动化,提高产品质量与劳动生产率,实现生产过程的自动化和改善劳动条件。
1.2 技术要求及预期效果
根据设计要达到以下要求:
a. 最大搬运重量:5kg;
b. 最大工作范围:850mm;
c. 标准周期:0.59sec;
d. 重复定位精度: mm;
e. 生产纲领:大批大量。
此次设计的垂直多关节机器人可以实现大臂小臂的旋转,手腕的旋转与摆动以及手爪的自动抓取与放松工件运动。此装置应用在焊接生产线上将大大提高生产效率和加工质量,降低了工人的劳动强度,能够带来可观的经济效益。
1.3 本课题要解决的主要问题及设计总体思路
本课题要解决的问题有以下三个:
a. 手腕处于手臂末端,需减轻手臂的载荷,力求手腕部的结构紧凑,减少重量和体积;
b. 提高手腕动作的精确性;
c. 三个自由度的实现。
目录
第一章 前言 1
1.1课题来源 1
1.2 技术要求及预期效果 1
1.3 本课题要解决的主要问题及设计总体思路 1
1.4 国内外研究现状及发展状况 2
1.4.1 研究现状 2
1.4.2 发展趋势 3
第二章 总体方案设计 5
2.1 机械结构类型的确定 5
2.2 传动方案的确定 5
2.3 工作空间的确定 6
2.4 手腕结构的确定 7
2.5 驱动装置的选择 9
2.5.1 机器人驱动方案的分析和选择 9
2.5.2 手腕电机的选择 9
2.5.3 传动比的确定及分配 11
第三章 齿轮的设计 12
3.1齿轮强度的设计与校核 12
3.1.1第一级圆柱齿轮传动设计 12
3.1.2 第二级圆锥齿轮传动设计 15
第四章 轴的设计 19
4.1 转腕传动轴的选择 19
4.2 摆腕传动轴的设计 19
4.2.1 圆柱齿轮轴的设计 19
4.2.2 轴的强度校核 20
4.2.3 圆锥齿轮轴的设计 24
4.2.4 手腕连接轴的设计 25
4.2.5 大臂小臂连接轴的设计 27
第五章 轴承的设计 28
5.1 轴承的选择 28
5.2轴承的寿命计算 28
第六章 其它零部件的选用 30
6.1 键连接的选用 30
6.2 壳体的设计 30
6.3 机器人手臂材料的选择 30
6.4 机器人臂部连接件的选用 31
第七章 关节型机器人的位姿分析 32
第八章 控制系统介绍与选择 36
8.1 单片机最小系统 36
8.1.1 8051单片机介绍 37
8.1.2 复位电路 38
8.1.3 振荡电路 39
8.2 串行接口电路 39
8.3 传感器 40
8.3.1 传感器的选型 40
8.3.2 硬件电路的设计 41
8.4 电动机的控制 42
8.4.1 L298N电机驱动芯片简介 42
8.4.2 硬件电路图 43
第九章 结论 44
参 考 文 献 45
致 谢 46