
多关节仿生机器鱼尾鳍设计及运动控制机理研究(含CAD图)
无需注册登录,支付后按照提示操作即可获取该资料.
多关节仿生机器鱼尾鳍设计及运动控制机理研究(含CAD图)(任务书,开题报告,论文说明书17000字,CAD图1张)
仿生机器鱼游动机理
鱼体的轮廓为扁平形流线体,这种体型符合流体力学的规律,可减少水流的阻力,从而有助于鱼类游动。鱼鳍包括尾鳍、背鳍、臀鳍、腹鳍、胸鳍。胸鳍和背鳍用于维持鱼体的平衡和稳定,防止鱼在行进的过程中发生侧翻,同时胸鳍还能有助于加减速和转弯。尾鳍作为鱼类的主要推进鳍,提供主要的前进推力,其运动的规律符合Lighthill等人总结的鱼体波曲线。当鱼体的轴线与尾鳍摆动的中心线重合时,鱼体向前游动;当鱼体的轴线与尾鳍的摆动角度存在一个夹角时,鱼体就会发生转弯[23]。
目录
第1章绪论 1
1.1目的及意义 1
1.2仿生机器鱼研究背景 2
1.2.1鱼类推进方式分类及比较 2
1.2.2仿生机器鱼尾鳍分类 3
1.3国内外研究现状 4
1.3.1国外研究现状 4
1.3.2国内研究现状 5
1.4研究的基本内容、目标、拟采取的技术方案及措施 6
1.4.1研究目标 6
1.4.2拟解决的关键问题 6
1.4.3研究方案及措施 7
1.4.4论文章节安排 7
第2章仿生机器鱼结构设计 8
2.1仿生机器鱼游动机理 8
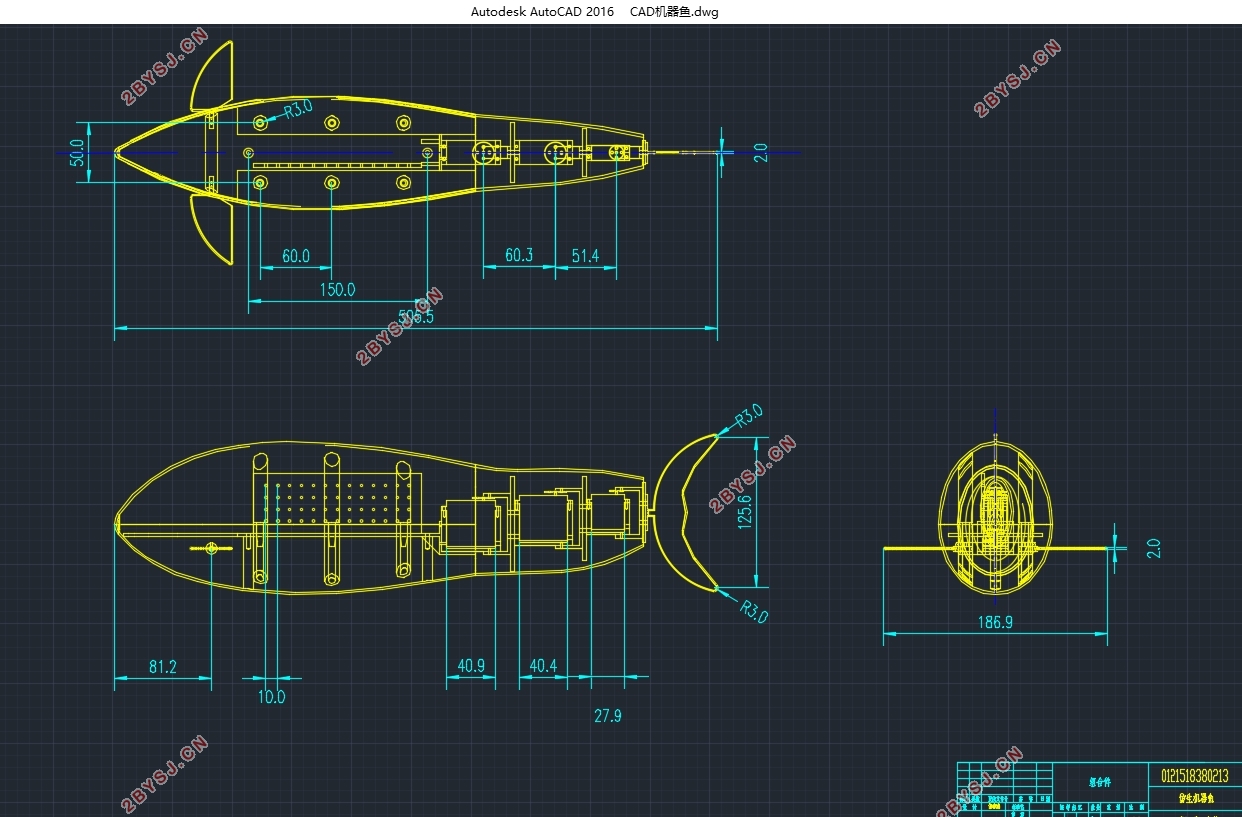
2.2仿生机器鱼二维轮廓设计 8
2.3仿生机器鱼鱼体设计 10
2.3.1鱼体外部结构设计 10
2.3.2鱼体内部结构布局 12
2.4仿生机器鱼尾鳍及胸鳍设计 12
2.4.1仿生机器鱼尾鳍结构设计 13
2.4.2仿生机器鱼胸鳍结构设计 15
2.5仿生机器鱼的装配与密封性方案 15
2.6本章小结 16
第3章仿生机器鱼Fluent仿真分析 17
3.1计算流体力学概述 17
3.2 Fluent软件介绍 17
3.3二维仿真模型的建立 18
3.3.1二维仿真内容概述 18
3.3.2模型简化 18
3.3.3 WORKBENCH前处理 18
3.4 Fluent求解分析 20
3.4.1鱼体静态仿真分析 20
3.4.2鱼体动态仿真分析 22
3.5本章小结 28
第4章仿生机器鱼控制系统设计 30
4.1控制系统硬件设计 30
4.1.1处理器 31
4.1.2控制单元 32
4.1.3供电单元 35
4.1.4通信单元 36
4.2控制系统软件设计 36
4.2.1单舵机控制系统软件设计 36
4.2.2三关节舵机控制系统软件设计 39
4.3本章小结 40
第5章经济性与环保性分析 42
5.1经济性分析 42
5.2环保性分析 42
第6章总结与展望 43
6.1总结 43
6.1.1全文总结 43
6.1.2创新点 43
6.2展望 43
参考文献 45
致谢 47