
宝骏E200纯电动轿车转向系设计(含CAD零件装配图,matlab程序)
无需注册登录,支付后按照提示操作即可获取该资料.
宝骏E200纯电动轿车转向系设计(含CAD零件装配图,matlab程序)(任务书,开题报告,文献摘要,外文翻译,论文说明书14000字,CAD图8张,matlab程序)
摘要
随着石油与环保问题的凸显与蓄电池性能的提升,电动汽车的技术也更加成熟,电动汽车得到了广泛的应用[1]。同时,电动汽车的标准也逐渐呈现系列化、标准化的现代化趋势[2]。在电动汽车中,转向系统在其中尤为关键。
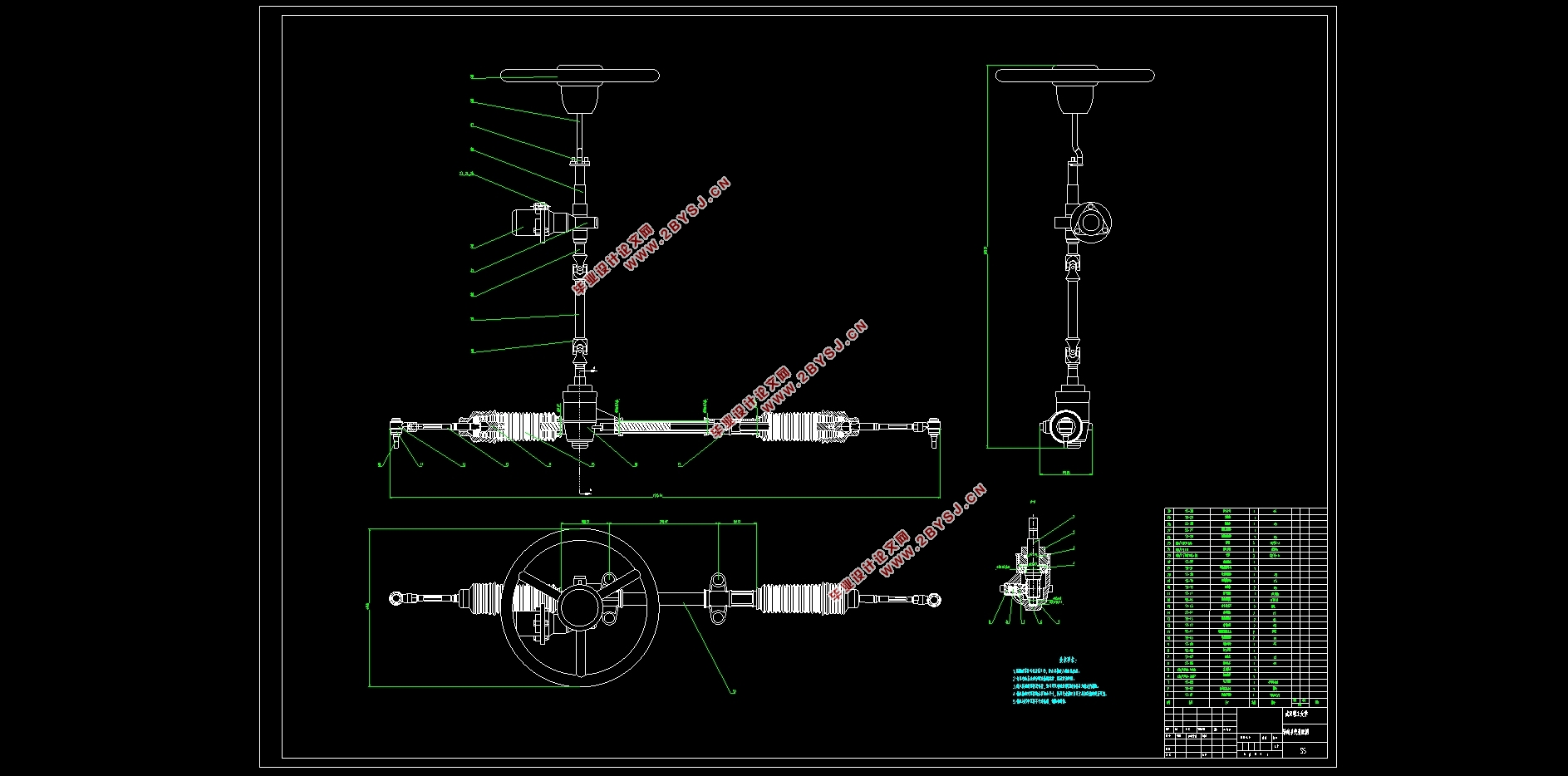
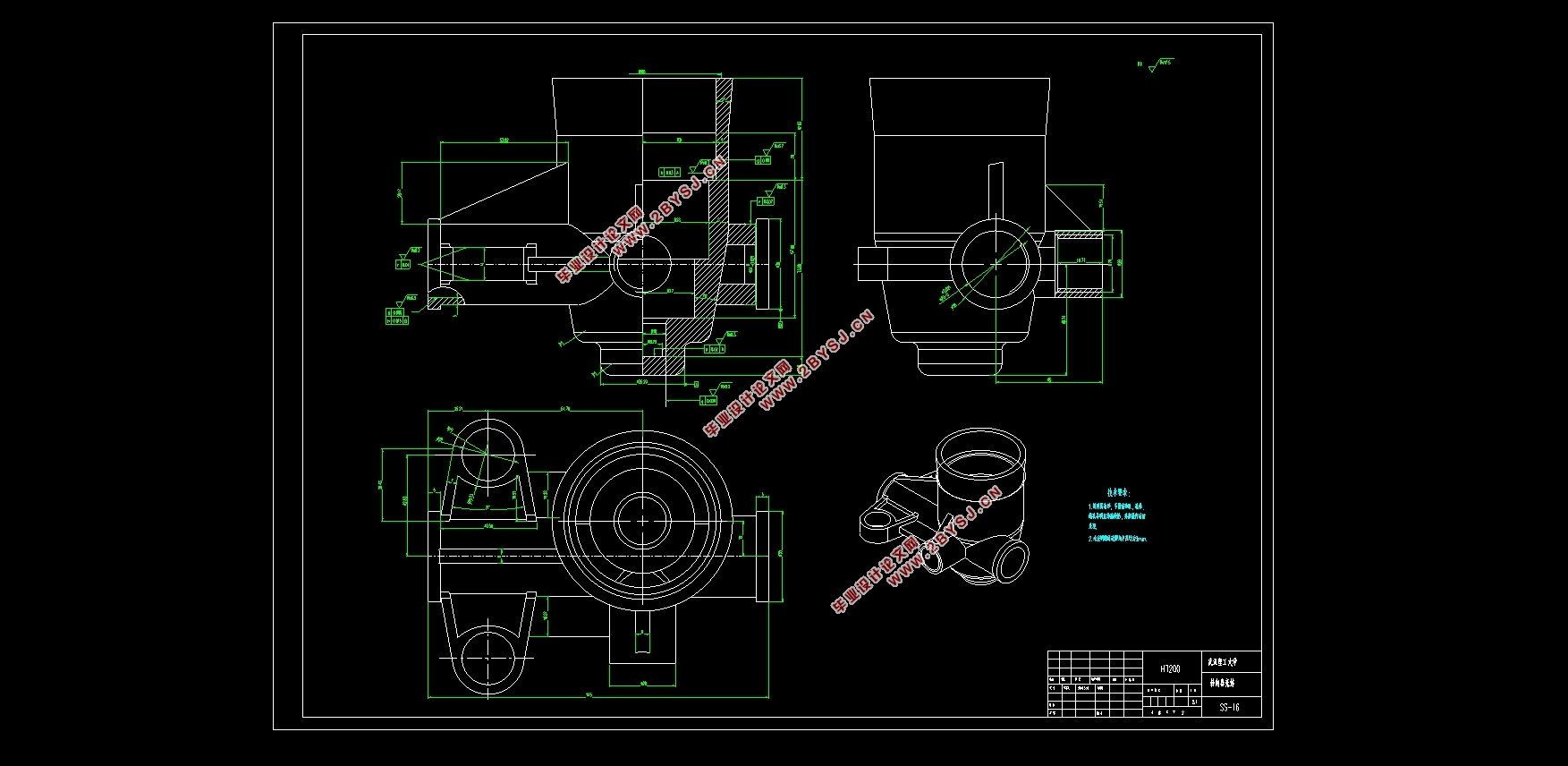
本文设计了宝骏E200纯电动轿车的转向系。此电动汽车的转向系统采用电动助力转向系统。它主要包括转向操纵机构、电动助力机构、齿轮齿条式转向器和转向传动机构等。电动助力转向系统通过助力电机提供转向助力。本文首先对该汽车转向系统中各部件的结构形式的分类与特点分析比较,从而确定了转向系统中操纵、助力、传动等各机构的方案,并按照方案进行了设计,确定其基本参数,并对其进行设计计算分析与校核,利用matlab优化函数对转向梯形参数进行了优化设计,且对EPS控制策略进行了分析与算法设计。
关键词:电动助力转向;转向梯形;齿轮齿条转向器;控制策略
Abstract
Withthehighlightofpetroleumandenvironmentalissuesandtheimprovementofbatteryperformance, thetechnologyofelectricvehiclesismoremature, andelectricvehicleshavebeenwidelyused. Atthesametime, thestandardsofelectricvehiclesaregraduallyshowingthetrendofserializationandstandardization. Inelectricvehicles, steeringsystemsareparticularlycritical.
ThispaperdesignedthesteeringsystemofBaojunE200pureelectriccar. Thesteeringsystemofthiselectricvehicleusesanelectricpowersteeringsystem. Itmainlyincludessteeringmechanism, electricassistmechanism, rackandpinionsteeringgearandsteeringtransmission. Theelectricpowersteeringsystemprovidessteeringassistancethroughaboostermotor. Inthispaper, theclassificationandcharacteristicsofthestructuralformsofvariouscomponentsinthesteeringsystemoftheautomobilearefirstlyanalyzedandcompared, sothattheschemesofthesteering, steering, transmissionandothermechanismsinthesteeringsystemaredetermined, andthebasicparametersaredeterminedaccordingtothescheme. Thedesigncalculationanalysisandverificationarecarriedout. Theoptimizationofthesteeringtrapezoidalparametersiscarriedoutbyusingthematlaboptimizationfunction, andtheEPScontrolstrategyisanalyzedandalgorithmdesigned.
Keywords:EPS;Steeringtrapezoid; Rackandpinionsteeringgear;Control strategy
本文设计车型参数
本文所设计宝骏E200电动汽车主要参数见表1.1。由表中参数可知,本车为一微型两厢纯电动汽车,设计时应注意考虑空间布置、经济成本、操纵平稳性等因素。
表1.1宝骏E200汽车主要参数
参数 值
长/宽/高(mm) 2497/1526/1616
电动机总功率/总扭矩(kW/N•m) 29/110
轴距(mm) 1600
前/后轮距(mm) 1310/1320
整备质量(kg) 830
满载总质量(kg) 960
驱动方式 前轮驱动
动力类型 纯电动
前悬架类型 麦弗逊式独立悬架

目录
第1章 绪论 1
1.1 电动助力转向系统概述 1
1.2 电动助力转向系统发展现状 2
1.3 研究目的及意义 2
1.4 本文设计车型参数 3
第2章 转向操纵机构与助力机构设计 4
2.1 转向操纵机构 4
2.1.2 转向盘尺寸 4
2.1.3 转向轴的防伤安全措施 4
2.2 电动助力机构 5
2.2.1 特点 6
2.2.2 分类及选型 6
2.2.3 电动机的选择 7
2.2.4 电磁离合器的选择 8
2.2.5 扭矩传感器的选择 8
第3章 转向器的设计 10
3.1 分类与选型 10
3.1.1 循环球式转向器 10
3.1.2 蜗杆滚轮式转向器 10
3.1.3 齿轮齿条式转向器 11
3.2 结构选择 12
3.2.1 输入输出形式 12
3.2.2 齿轮齿条形式选择 13
3.2.3 布置形式 13
3.3 参数计算 14
3.3.1 最小转弯半径 14
3.3.2 内、外侧转向轮最大转角 14
3.3.3 计算载荷 15
3.4 齿轮齿条设计 16
3.4.1 设计要求 16
3.4.2 齿轮设计 16
3.4.3 齿面接触疲劳强度校核 18
3.4.4 齿条设计 19
第4章 转向传动机构设计 21
4.1 转向梯形的优化设计 21
4.1.1 理想的内外轮转角关系 21
4.1.2 实际的内外轮转角关系 22
4.1.3 数学模型的建立 24
4.1.4 Matlab优化函数求解 25
4.2 球头销的设计 25
第5章 EPS系统控制策略 27
5.1 EPS控制策略概述 27
5.2 EPS控制策略目标 27
5.3 EPS控制模式 27
5.3.1 助力控制模式 27
5.3.2 阻尼控制模式 28
5.3.3 回正控制模式 28
5.4 控制算法设计 28
第6章 结论 30
参考文献 31
致 谢 33
附录 34
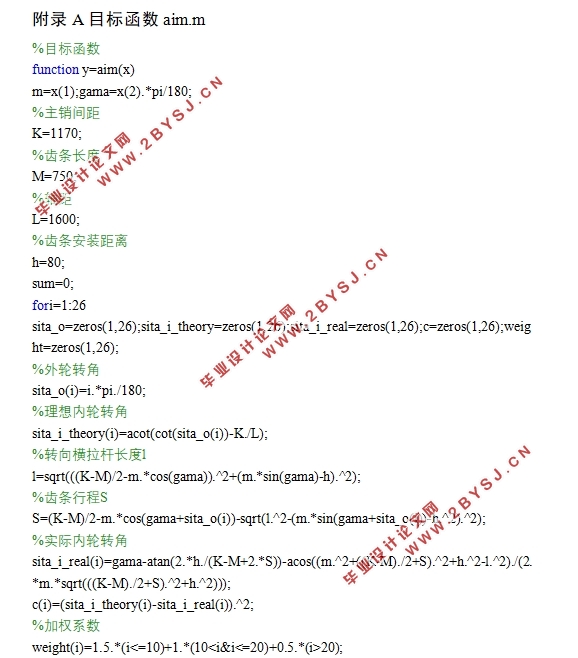
附录A 目标函数aim.m 34
附录B 控制群算法pso.m 35
附录C 实际内轮转角sita_i_real.m 36
附录D 理想内轮转角sita_i_theory.m 36
附录E 绘制转角图线sita_figure.m 37