
宝骏E200纯电动轿车悬架设计(含CAD零件图装配图,CATIA三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
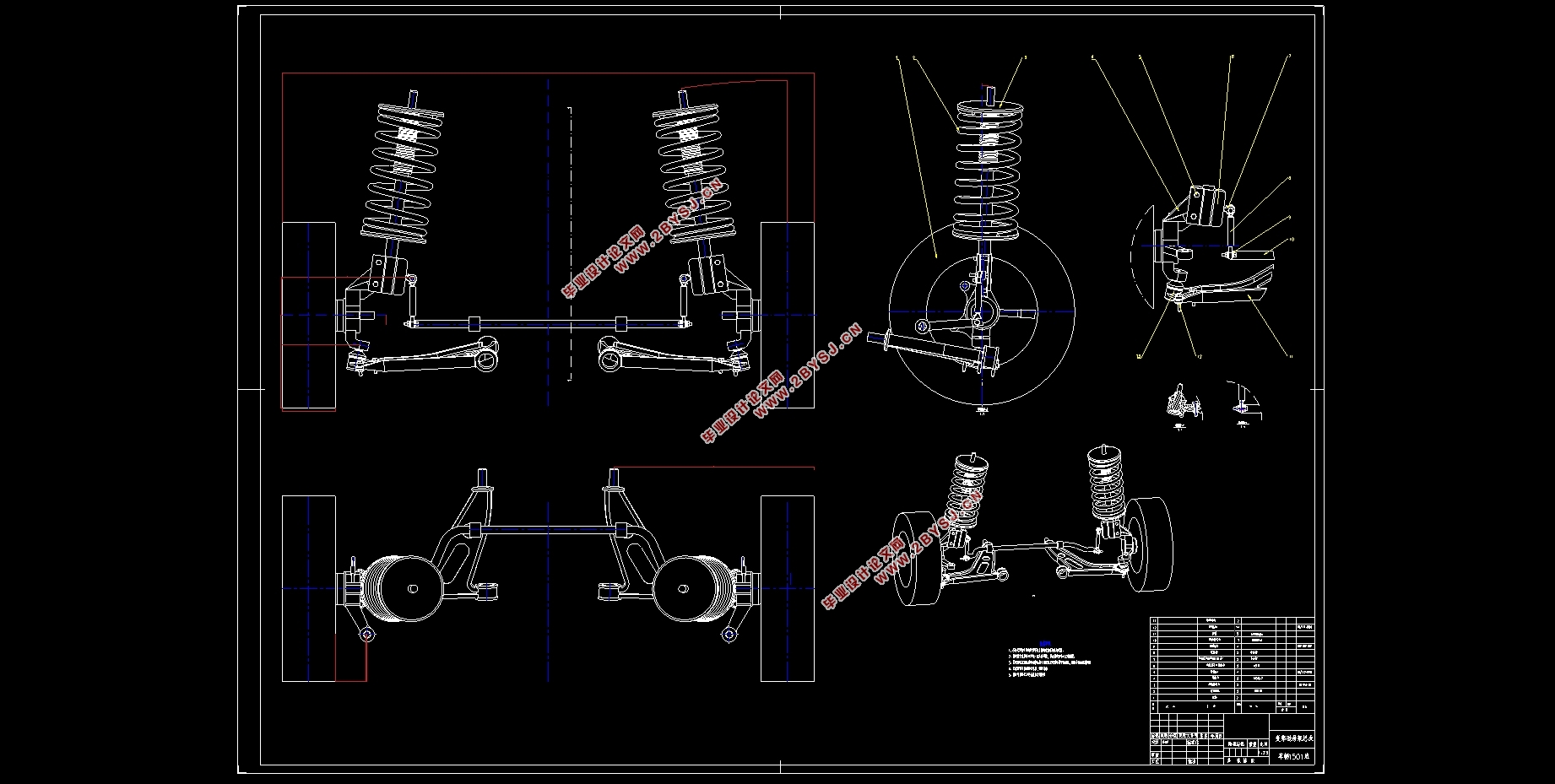
宝骏E200纯电动轿车悬架设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书10000字,CAD图7张,CATIA三维图)
摘要
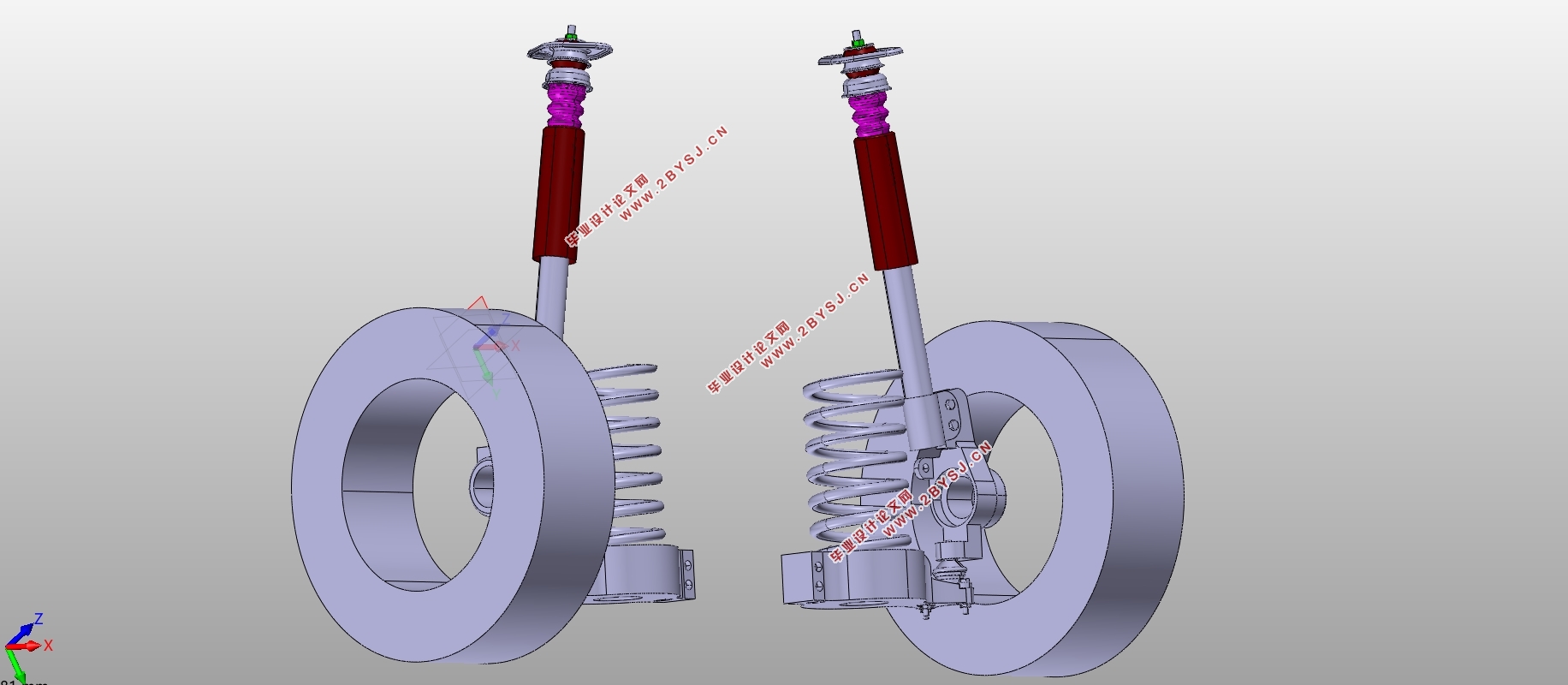
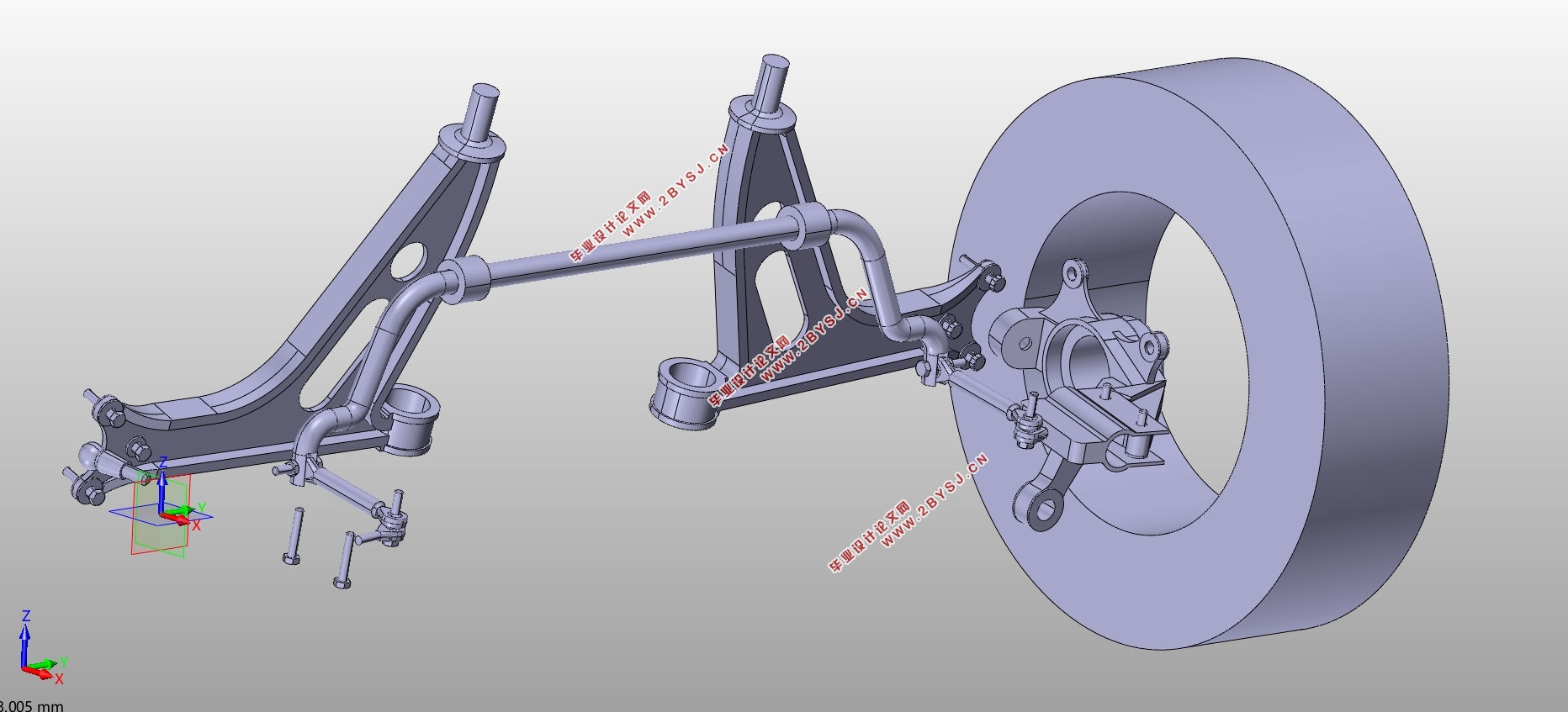
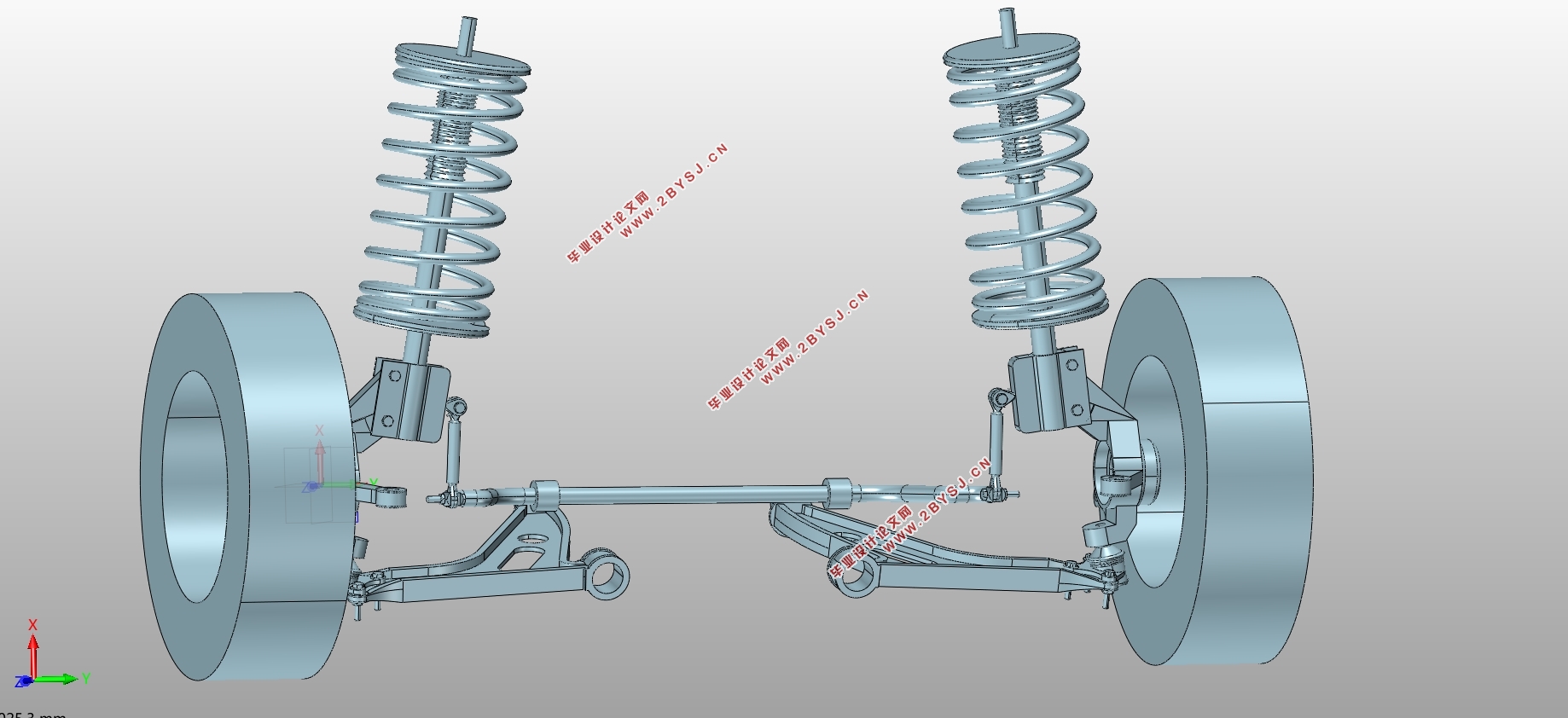
本文以宝骏E200纯电动轿车为设计目标,对其前后悬架进行了选型和设计仿真。首先确定悬架的刚度,轴荷分配等因素,再对减振器进行选型,螺旋弹簧,横向稳定杆和其他连接件进行结构分析与设计计算,然后根据宝骏E200的总布置来确定悬架各部件之间的位置关系,并通过三位软件Catia得到了前后悬架装配总成,进而得到对应的装配图,零件图等CAD图纸。最后,在Catia中获取前麦弗逊悬架关键硬点坐标,并在Adams Car中进行建模和平行轮跳仿真,从而得到轮跳过程中四轮定位参数的变化情况,以进一步验证分析设计的合理性。
关键词:麦弗逊独立悬架 单横臂独立悬架 Catia建模 Adams仿真分析
Abstract
This paper takes Baojun E200 pure electric car as the design goal, and selects and designs the frontsuspension and rear suspension. Firstly,determine the stiffness of the suspension, the distribution of the axle load and other factors, then select the damper, coil spring, stabilizer bar and other joints for structural analysis and design calculation, and then determine the suspension according to the overall arrangement of Baojun E200. The positional relationship between the components, and the frontsuspensions and rear suspension assembly was obtained through the three-digit software Catia, and the corresponding assembly drawings, part drawings and other CAD drawings were obtained. Finally, the key hard point coordinates of the former MacPherson suspension are obtained in Catia, and the modeling and parallel wheel jump simulation are performed in Adams Car to obtain the variation of the four wheel alignment parameters during the wheel jump process to further verify the analysis design. Rationality.
Key words:McPherson Independent Suspension;Single cross arm independent suspension;Catia modeling;Adams simulation analysis
1.2.1设计基本内容
1) 查找宝骏E200的相关参数和可用的悬架类型,确定宝骏E200悬架的选型。
2) 学习研究麦弗逊悬架和单横臂悬架的零件具体结构,设计螺旋弹簧、阻尼器、导向机构和稳定杆等部件,完成Catia建模与装配,并导出相应的CAD图纸。
3) 运动Adams Car进行麦弗逊悬架建模仿真,分析轮跳过程中四轮定位参数的变化,验证设计的合理性。
1.2.2预期目标
1) 设计计算和检验弹性元件,减振器,导向机构,横向稳定杆的结构及参数,运用Catia进行零件的建模与悬架装配。
2) 由Catia的模型导出CAD图纸,并进行材料,尺寸公差的标注。
3) 运用Adams Car对麦弗逊悬架进行平行轮跳仿真,对四轮定位参数变化图进行分析,验证悬架的设计是否合理。
目录
第1章 绪论 1
1.1 引言 1
1.1.1 课题研究目的 1
1.1.2 课题研究意义 1
1.1.3 国外研究现状 1
1.1.4 国内研究现状 2
1.2 设计基本内容和预期目标 2
1.2.1 设计基本内容 2
1.2.2 预期目标 3
第2章 悬架系统概述 4
2.1 悬架的功用和设计要求 4
2.2 麦弗逊悬架结构分析 4
2.3 单横臂悬架结构分析 5
2.4 悬架选型分析 5
第3章 悬架技术参数的计算 6
3.1 悬架频率的确定 6
3.2 悬架挠度的计算 6
3.2.1 悬架静挠度的计算 6
3.2.2 悬架动挠度的计算 7
3.3 悬架刚度的计算 7
第4章 悬架主要零件的设计 8
4.1 悬架减振器的设计 8
4.1.1 相对阻尼系数ψ的选择 9
4.1.2 减振器阻尼系数δ的确定 9
4.1.3 减振器最大卸荷力F0的确定 10
4.1.4 减振器工作直径D的确定 10
4.1.5 最小导向长度的确定 11
4.1.6 活塞尺寸的计算 11
4.1.7 减振器技术参数总结 12
4.2 弹性元件的设计 12
4.2.1 弹性元件的确定 12
4.2.2 螺旋弹簧刚度的计算 12
4.2.3 螺旋弹簧材料的选择 13
4.2.4 前悬架螺旋弹簧设计 15
4.2.5 后悬架螺旋弹簧设计 17
4.3 导向机构的设计 18
4.3.1 独立悬架导向机构的设计要求 18
4.3.2 导向机构的布置参数 19
4.3.3 横臂长度的确定 20
4.4 横向稳定杆的设计 20
第5章 悬架零件的三维设计 23
5.1 前悬架的主要零件设计 23
5.1.1 螺旋弹簧 23
5.1.2 减振器 23
5.1.3 转向节 24
5.1.4 球销及其附件 25
5.1.5 控制臂 26
5.1.6 减振器套筒 27
5.1.7 横向稳定杆与减振器套筒连接杆 27
5.1.8 横向稳定杆 28
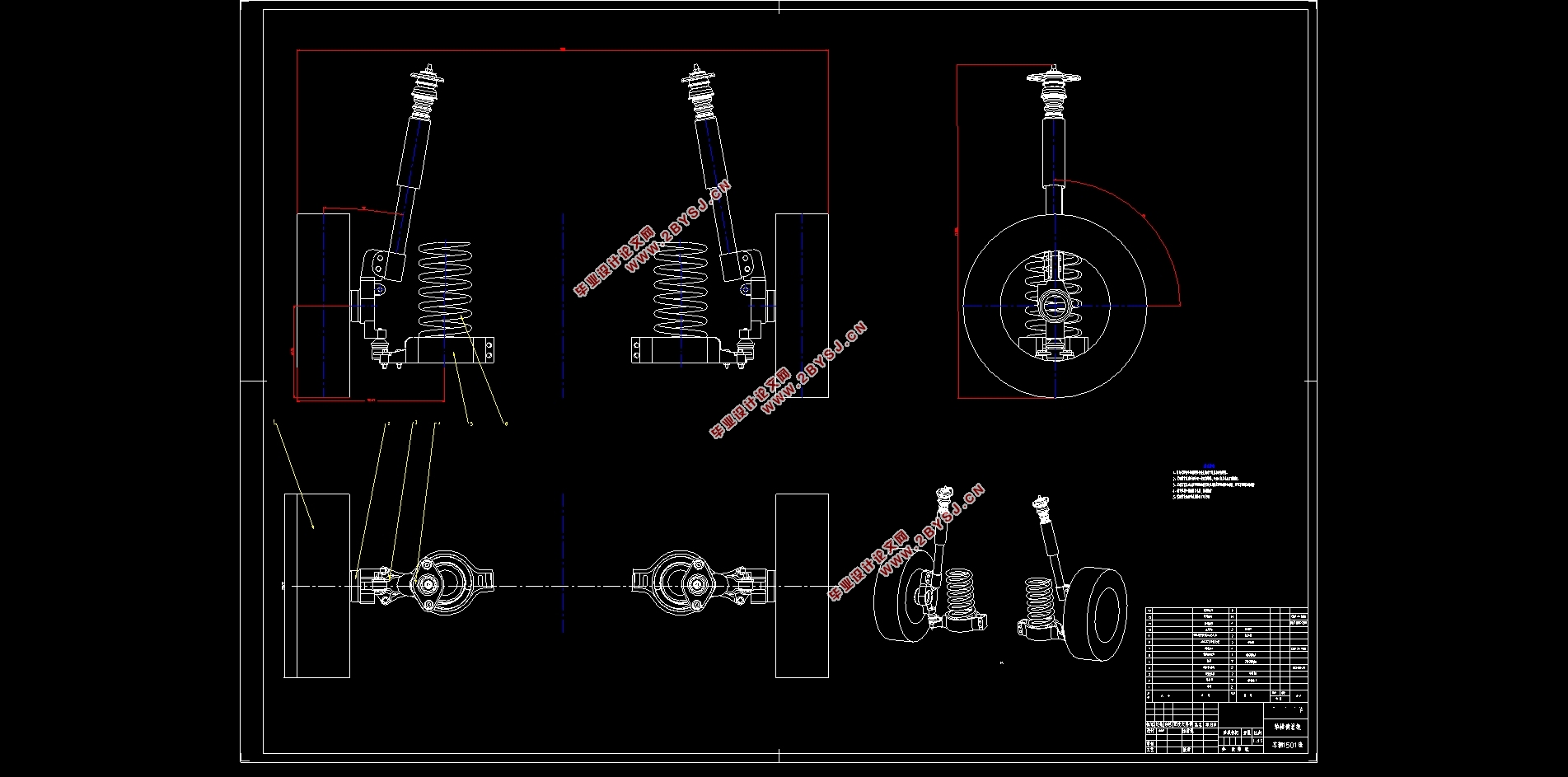
5.1.9 麦弗逊悬架装配图 28
5.2 后悬架的主要零件设计 30
5.2.1 横臂 30
5.2.2 螺旋弹簧 30
5.2.3 减振器 31
5.2.4 节臂 31
5.2.5 减振器套筒 32
5.2.5 单横臂悬架装配图 32
第6章 麦弗逊悬架仿真 33
6.1 悬架参数确定 33
6.1.1 悬架硬点坐标的确定 33
6.1.2 悬架建模 33
6.2 平行轮跳仿真 34
6.2.1 仿真参数的设定 34
6.2.2 前轮前束变化曲线 35
6.2.3 前轮外倾角变化曲线 35
6.2.4 主销后倾角变化曲线 36
6.2.5 主销内倾角变化曲线 37
6.3 仿真小结 38
第7章 结论 39
参考文献 40
致谢 42