
普通机床物料搬运机械手设计(含CAD装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
普通机床物料搬运机械手设计(含CAD装配图)(论文说明书9300字,外文翻译,CAD图5张)
摘 要
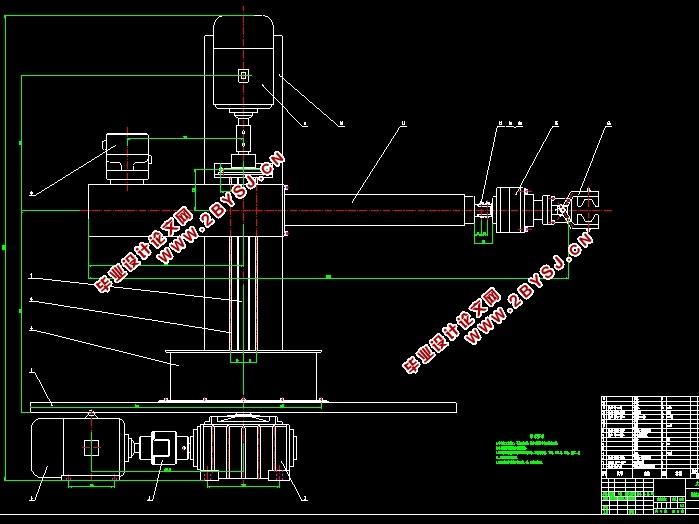
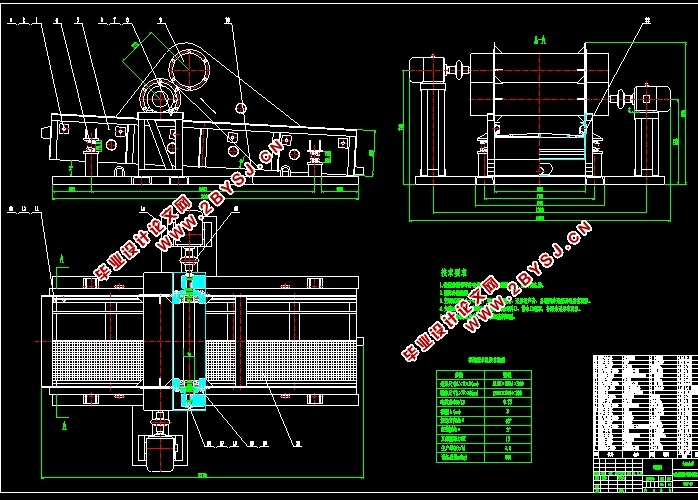
随着工业产业水平的发展的自动化,机器人的使用率越来越大,机械手也得到了工业生产的大量普及,它们被运用到了电子设备产业、汽车产业、食品产业、机械的加工与成型产业、医药产业等的流水线上, 它们不仅能够提高运输被运物的效率而且还可以节约地球上珍贵的能源,减低认为操作带来的失误和成本,使现代经济的发展需求得到满足。通过老师的悉心教导和自己查阅文献,在本文中对物料搬运机械手进行了总体机构的设计,设计出了直角坐标形式的搬运机械手。使机械手的能够完成机身的旋转,机械手臂的伸缩和升降;根据机械手的技术参数设计了机械手的手部夹持机构,并完成了二维图纸的工作量,并且对机械手的电动机和减速器的型号进行了选择;对机械传动系统、驱动系统的进行了设计,其中驱动系统包括液压系统和电机系统,电机系统选用了两个电机,在底座上的电机为机身的旋转提供动力,另一个电机为手臂的升降提供动力;并完成了整体的液压系统的设计计算,绘制了机械液压系统工作原理图。
关键词: 机械手; 液压伺服定位; 驱动系统; 数控机床
ABSTRACT
With the development of automation in the industrial industry, the utilization rate of robots is getting larger and larger, and robots are also widely used in industrial production. they have been applied to the assembly lines of electronic equipment industry, automobile industry, food industry, machining and forming industry of machinery, pharmaceutical industry and so on. they can not only improve the efficiency of transporting transported goods, but also save precious energy on earth, reduce errors and costs caused by operation, and meet the development requirements of modern economy. Through the teacher's careful teaching and consulting the literature, this paper designs the overall mechanism of the material handling robot, and designs the handling robot in the form of right-angle coordinates. The manipulator can complete the rotation of the machine body, the extension and lifting of the manipulator; According to the technical parameters of the manipulator, the hand clamping mechanism of the manipulator is designed, and the workload of two-dimensional drawings is completed, and the models of the manipulator's motor and reducer are selected. The mechanical transmission system and drive system are designed, wherein the drive system comprises a hydraulic system and a motor system, and the motor system selects two motors, the motor on the base provides power for the rotation of the machine body, and the other motor provides power for the lifting of the arm. And completed the design and calculation of the overall hydraulic system, and drew the working principle diagram of the mechanical hydraulic system.
Key words: Manipulator;Hydraulic servo control;Drive system;Numerical control machine tools
机械手基本技术参数的确定
搬运机械手的基础技术参数是机械手的机能以及规格的数值:
1.臂力
本次设计的机械手所需要的臂力为30kg。
2.机器人的结构的形式和自由度的数目
本次设计的机械手所采用的坐标的形式为圆柱坐标的形式,其中它还包含了四个自由度,他们包含着:手腕回转运动、手臂的伸缩运动、手臂的升降运动以及机身带动手臂的旋转运动。
3.机械手的手指的夹持范围
本次设计的机械手夹持的圆柱形棒料工件,夹持范围为60~100mm。
4.控制方式
由PLC控制。
5.定位精度
本次设计所设计的机械手定位精度是"±1 " mm。

目 录
1 .绪论 1
1.1本课题的目的和意义 1
1.2 机械手国内外研究进展及发展趋势 1
1.3 设计要求 2
2. 机械手总体方案设计 3
2.1机械手总体结构的类型 3
2.2机械手基本技术参数的确定 3
2.3设计方案 4
2.4驱动方式的选择 5
2.5 机械手总装图 5
3. 机械手各部件设计计算 7
3.1 机械手手部结构的设计计算 7
3.2 腕部设计计算 9
3.3臂伸缩机构设计 10
3.4机身和底座的设计 12
4. 机械手液压原理图设计 16
4.1手部抓取液压回路 16
4.2腕部转动液压回路 16
4.3小臂伸缩液压回路 16
4.4总体系统图 17
5. 电机和减速器的选择 19
5.1电机的选择 19
5.2减速器的选择 20
5.3螺柱的设计与校核 20
6. 机械手的定位缓冲装置 22
6.1常用的定位方式 22
6.2影响平稳性和定位精度的因素 22
6.3机械手运动的缓冲装置 23
7. 总结与展望 24
参考文献 25
附录1:译文 26
附录2:英文原文 30