
码垛机移动机构设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
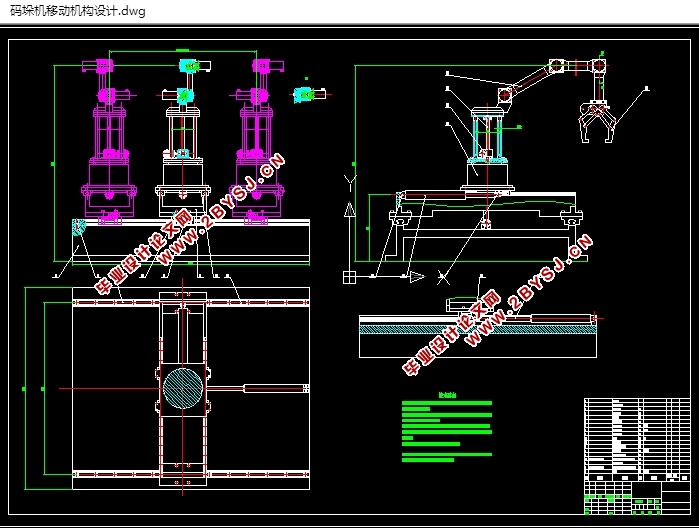
码垛机移动机构设计(含CAD零件图装配图)(任务书,论文说明书9500字,CAD图纸4张)
Palletizing machine mobile mechanism design
摘 要
本文简述了码垛机在国内外的发展历程、趋势和科研成果,并根据仓库中的实际情况设计研发一个多自由度机械臂以及末端执行器部位的货物拣选机器人。设计的机器人底座移动机构、关节包括底座、可旋转和升降的腰部、机械臂等四部分。吸盘机械手即末端执行夹持器。并且需要对机械臂等提供运动的关键部件进行计算和选取合适的电机以及齿轮。利用使用CAD软件制作该仓储货物码垛机的移动机构以及机械手的建立二维图,由此可以更加直观地对此机器人的运动进行观测和分析,可以用于论文编辑。
在我国迅速崛起的电子商务领域中,我国传统的人工物流模式难以应对目前迅速增长的货运量,限制了我国物流业甚至电子经济的发展。因此研发码垛机来替代效率低下的传统人工作业很有必要。码垛机需能自主检测到货堆中货物的所在位置,根据位置信息控制机器人的执行机构进行拣选即拆零动作,完成自动化作业。
关键词:码垛机;移动机构;机械臂
本课题研究的主要内容
码垛机一般由移动机构(包括水平行走机构和起升机构)、载货台及货叉机构、机架和电气设备等基本部分组成。本课题的码垛机主要针对移动机构进行设计。课题设计过程中需要明确码垛机(特别是其移动机构)的工作原理,掌握码垛机移动机构设计的基本原则和任务,确定合理的结构方案,进行主要零部件的结构设计及强度计算。主要设计内容包括:码垛机移动机构整体方案设计、水平行走机构设计、起升机构设计及其他辅助系统的设计。
设计要求:水平方向(X向)运行速度(2-50m/s)、垂直方向(Z向)运行速度(2-50m/s)、X向移动范围(<1.8m)、Z向移动范围(<2m)、Y向移动范围(<2m)。
利用AutoCAD等绘图软件及机械设计的基本知识,完成码垛机移动机构的设计,通过该课题的研发工作,使学生能够正确运用所学课程的基本理论和有关知识,学会设计方案的拟定、比较、分析及进行必要的计算, 提高学生应用工程技术,设计手册、标准以及编写文件的能力。

目 录
摘 要 I
Abstract 1
第一章 概述 2
1.1 选题背景 2
1.2 研究意义 3
1.3 本课题研究的主要内容 3
第二章 行走部分的设计 5
2.1 行走装置设计要求 5
2.2 行走部分方案设计 5
2.3 直线导轨的选择计算 5
2.3.1选定条件 5
2.3.2选择方式 5
2.4 液压传动原理图 7
第三章 码垛机腰部的设计 8
3.1 码垛机的腰部结构简述 8
3.2 腰部升降结构设计计算 8
3.2.1 腰部升降所用零件简述 8
3.2.2 相关部件的校核计算 8
接触疲劳强度计算公式 8
3.2.3 蜗杆蜗轮机构部件的主要参数即尺寸 9
3.3 丝杠螺母设计计算 10
3.3.1 确定滚珠丝杠副的导程Ph 10
3.3.2 确定当量转速与当量载荷Fm 10
3.3.3 确定预期额定动载荷 Cam 11
3.3.4 确定丝杠最小螺纹底径d2m 11
3.4 腰部齿轮回转结构设计计算 12
3.4.1 齿轮基本参数设计计算即选定 12
3.4.2 计算齿面接触强度并校核 12
3.4.3 齿根弯曲强度设计计算 13
3.4.4几何尺寸计算 14
3.5 导柱的设计与校核 15
3.6 腰部结构设计图 15
3.6确定电机的型号 16
3.6.1 腰部齿轮回转电机选取 17
3.6.2 腰部升降机构的电机选取 17
第三章 CAD装配图的绘制 18
4.1 基本绘制要求 18
4.2 绘制内容与步骤 18
4.3 技术要求 19
7 结 论 21
参考文献 22
致谢 23