
四级伸缩臂机构实体建模设计(含CAXA零件图装配图,UG三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
四级伸缩臂机构实体建模设计(含CAXA零件图装配图,UG三维图)(任务书,开题报告,外文翻译,论文说明书14600字,CAXA图纸3张,UG三维图)
伸缩手臂是起重设备的重要受力构件,其形式主要往往取决于起重机的吨位。本次毕业设计设备用于清理地下水道的石块儿,碎石,淤泥等,属于小型起重设备。伸缩手臂缩手臂我采用伸缩油缸加绳排的伸缩机构的型式,级数为四级即五节传动臂。
绳排系统目前在国内应用比较广泛,此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。
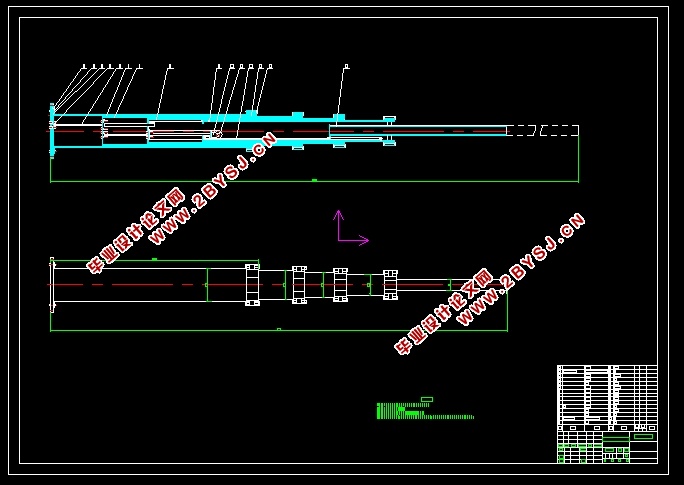
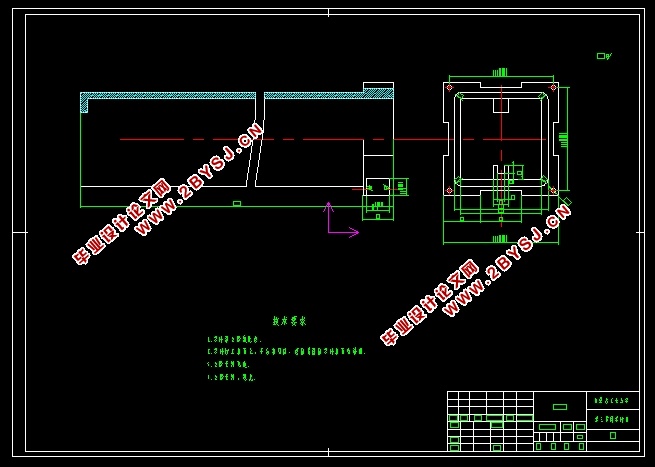
此次伸缩手臂的截面设计为正方形,主要考虑到便于支撑定位和润滑,在手臂的前端和尾端均安装了四个支撑滑块,同时在其上润滑脂的作用下起到润滑减小摩擦的作用。主要工作部件绳排系统由四根钢丝绳和四个滑轮组成,完成手臂的伸缩动作,具体形状及工作形式见正文。
本次手臂设计采用两个液压缸,作为手臂伸缩的动力源。液压缸1的活塞杆铰点安装在1 节臂上,缸筒铰点安装在2 节臂上,伸缩油缸2 的活塞杆铰点安装在2 节臂上,缸筒铰点安装在3 节臂上,伸缩油缸2及通过2 组伸缩臂绳带动3、4、5节臂同步伸出,具体工作原理会在正文中结合图形加以陈述。
关键词:四级伸缩;绳排;液压驱动;同步伸缩
本次毕业设计设备用于清理地下水道的石块儿,碎石,淤泥等,属于小型起重设备。而且负载也只有几十千克,故选择绳排伸缩手臂既可以满足要求。
最大负载: 1500N; 伸缩臂形式:套入式;
伸缩臂节数:4节; 伸缩臂最大伸出长度:7M。
目 录
引 言 1
第一章 课题背景 2
1.1 概述 2
1.2 箱形伸缩臂的发展和设计技术 2
1.3 国内箱形伸缩臂稳定性研究的状况 3
第二章 伸缩臂传动方案和结构的确定 5
2.1 伸缩手臂概述 5
2.2 伸缩臂的分类 5
2.2.1 绳排式伸缩手臂 5
2.2.2 单缸插销式伸缩手臂 6
2.2.3 滑移式伸缩臂 8
2.2.4 套入式伸缩臂 9
2.3比较及选型 9
2.4伸缩臂传动方案的确定 10
2.5伸缩臂架的截面形式分类 11
第三章 伸缩臂设计计算 12
3.1吊臂材料的确定 12
3.2吊臂各节尺寸的确定 12
3.3钢丝绳的选择 14
第四章 液压缸系统设计计算 15
4.1 液压系统设计原理 15
4.2液压缸工作压力的确定 17
4.3液压缸的尺寸计算 18
4.3.1液压缸缸筒内径D的计算 18
4.3.2液压缸活塞杆直径d的确定 18
4.3.3液压缸壁厚的计算 19
4.3.4缸体外径尺寸的计算 19
4.4缸筒制造加工要求 19
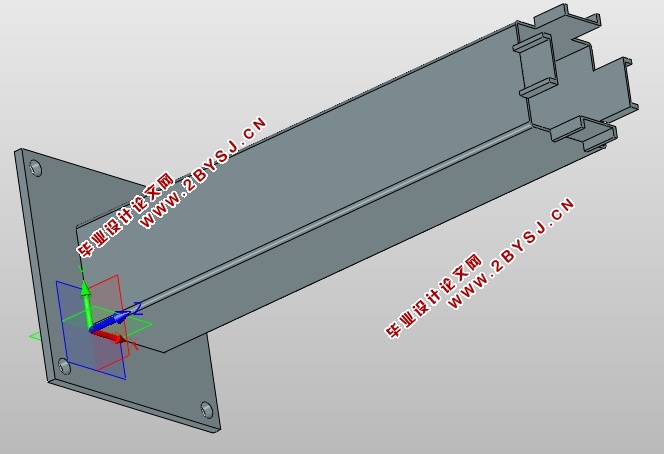
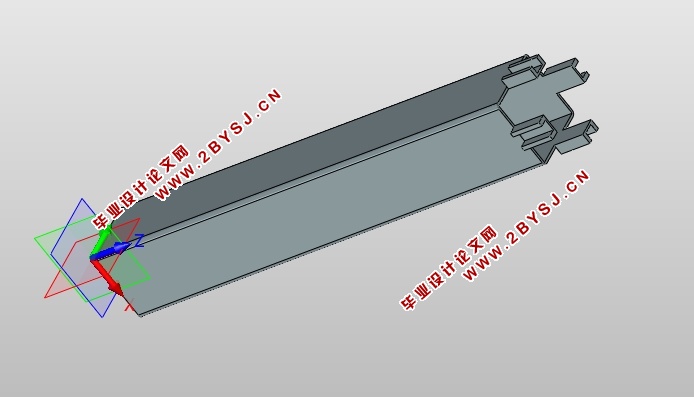
第五章 伸缩臂的建模 20
5.1伸缩臂的建模 20
5.2主要零件建模 20
5.3总体装配图 23
结 论 24
参考文献 25
谢 辞 26