
基于51单片机的直流电机转速监控系统设计(含电路原理图,程序)
无需注册登录,支付后按照提示操作即可获取该资料.
基于51单片机的直流电机转速监控系统设计(含电路原理图,程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文18300字,程序,答辩PPT)
摘 要
运动控制系统最主要的控制对象是电机,在不同的生产过程中,电机的运行状态要满足生产要求,其中电机转速的控制占有至关重要的作用。本文主要研究了利用51单片机输出PWM信号从而实现对直流电机转速控制的方法。文中采用了三极管组成了PWM信号的驱动系统,并且对PWM信号的原理、产生方法以及如何对PWM信号占空比进行调节作了详细的阐述。本系统中使用了霍尔元件对直流电机的转速进行测量,经过处理后,将测量值送到液晶LCD1602上显示出来。另外,系统有五个独立按键,可以对直流电机的正转、反转、加速、减速、启停过程进行控制。
关键词: PWM信号;霍尔元件;LCD1602;直流电动机
Abstract
The main control object of motion control system is the motor. In different production process, the motor running conditions need to meet production requirements, of which the motor speed control occupies a crucial role. This paper mainly studies the method that uses 51 microcontroller to output PWM signal for the control of DC motor speed. This paper uses transistors formed a drive system of the PWM signal, and the principle of the PWM, the signal generation method and how to adjust the duty cycle of the PWM signal is made in detail. The system uses a Hall element to measure the speed of a DC motor, after treatment, the measured values can be displayed on the LCD1602. In addition, the system has five separate buttons, the forward, reverse, acceleration, deceleration, start and stop process of the DC motor can be controlled.
Key words: PWM signal;Hall element;LCD1602;DC motor
系统总体设计方案
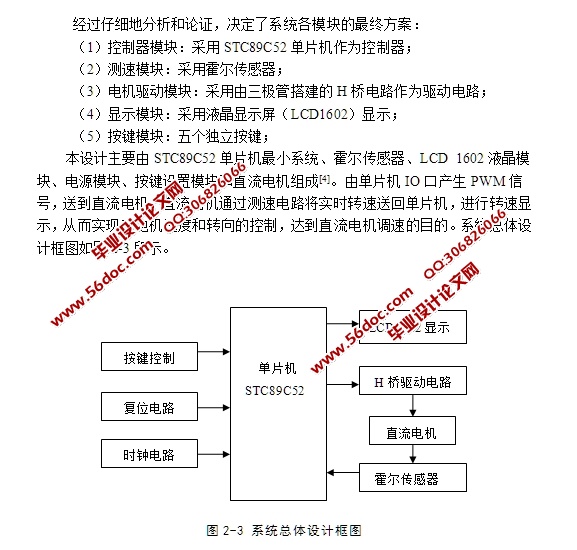
经过仔细地分析和论证,决定了系统各模块的最终方案:
(1)控制器模块:采用STC89C52单片机作为控制器;
(2)测速模块:采用霍尔传感器;
(3)电机驱动模块:采用由三极管搭建的H桥电路作为驱动电路;
(4)显示模块:采用液晶显示屏(LCD1602)显示;
(5)按键模块:五个独立按键;
本设计主要由STC89C52单片机最小系统、霍尔传感器、LCD 1602液晶模块、电源模块、按键设置模块和直流电机组成[4]。由单片机IO口产生PWM信号,送到直流电机,直流电机通过测速电路将实时转速送回单片机,进行转速显示,从而实现对电机速度和转向的控制,达到直流电机调速的目的。


目 录
第1章 概述 1
1.1 课题研究的背景、目的和意义 1
1.2 电机控制发展历史 2
1.3 本文主要研究内容及章节安排 4
第2章 系统总体设计 6
2.1 直流电机调速原理 6
2.2 直流调速系统实现方式 8
2.3 系统总体设计方案 8
2.4 本章小结 8
第3章 硬件设计 8
3.1 STC89C52单片机简介 9
3.2 液晶LCD1602简介 12
3.3 霍尔传感器简介 14
3.3 各部分硬件电路设计 16
3.3 本章小结 20
第4章 软件设计 20
4.1 主程序设计 21
4.2 霍尔测速子程序设计 21
4.3 PWM调速子程序设计 23
4.4 显示子程序设计 23
4.5 按键控制子程序设计 24
4.6 本章小结 25
第5章 系统调试和结果展示 26
5.1 程序设计编译环境 26
5.2 程序烧录 28
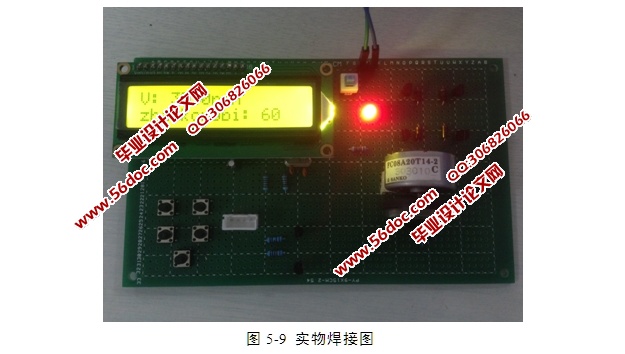
5.3 实物焊接与调试 30
5.4 本章小结 30
结 论 30
参考文献 33
致 谢 34
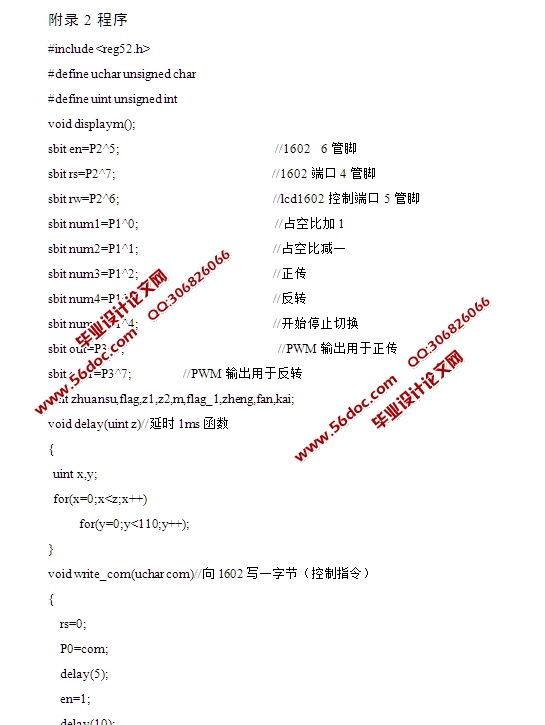
附录 35