
凸轮轴机床的工件输送机构的设计(含CAD零件图和装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
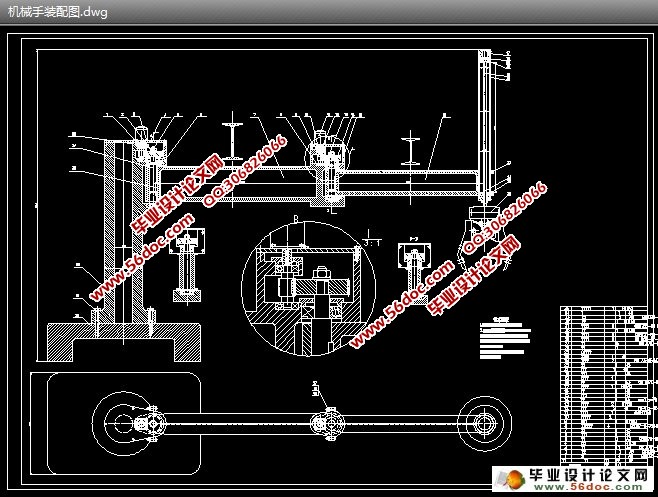
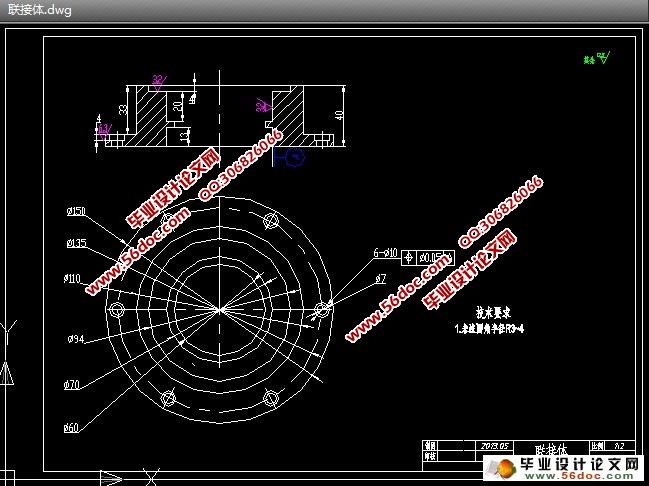
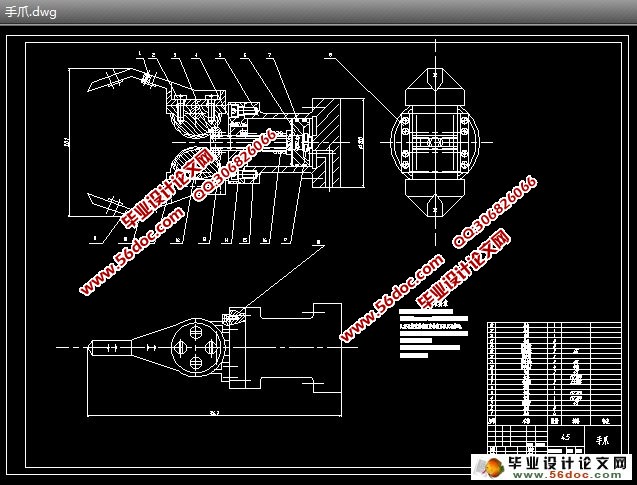
凸轮轴机床的工件输送机构的设计(含CAD零件图和装配图)(任务书,开题报告,中期报告,外文翻译,论文说明书11500字,CAD图9张)
摘 要
在现代企业生产过程中,生产线零件的输送是非常重要的工作之一,随着生产自动化的发展,目前,这一工作已由机械手的自动搬运逐渐替代传统的人工完成。机械手的出现在减轻工人劳动强度和难度、提高工作效率和质量、降低生产成本上做出了突出贡献,机械手的发展在企业的发展和创收上起到了举足轻重的作用。机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。工业机械手是近几十年发展起来的一种高科技自动生产设备。本课题设计一种在七工位凸轮轴加工机床上应用的机械手,用于实现工件的输送。明确机械手的功能、技术参数、工作原理、主要结构及特点。要求结构简单、抓取重量大、开合行程长、运行可靠,从而提高生产效率。
关键字:机器人;抓取装置;工业机械手;手爪
CAM shaft of machine tool workpiece conveying mechanism design
Abstract
In the modern enterprise production process, the delivery of parts of the production line is one of the very important work, with the development of production automation, this work by the automatic handling of the robot gradually replace the traditional manual. Reduce labor intensity and difficulty, improve work efficiency and quality, reduce production costs, the emergence of robot made outstanding contributions to the development of the robot has played a pivotal role in the development of enterprises and income-generating. The robot is imitating the action of manpower, the robotic device used to automatically capture, handling or operation to achieve a given program, track and requirements.The industrial robot is a high-tech automated production equipment developed in recent decades. The design of this project an application in the the seven stations camshaft machine tools, robots, used to implement the delivery of the workpiece. Clear function of the robot, the technical parameters, it works, the main structure and characteristics. Requirements of the structure is simple, grab the weight, opening and closing stroke, reliable operation, thereby enhancing production efficiency.
Keywords: robot ;grasping device;industrial manipulator; gripper
凸轮轴是发动机中的重要零件之一,其通常是由具有多段高次曲线型面的非圆轮廓面组成,其升程、转角与砂轮半径之间存在非线性关系,且大部分凸轮轴属细长轴类零件。而凸轮轴加工精度和质量直接影响到发动机的质量、废气排放、使用寿命、节能和效率。图1.2是某型号发动机的凸轮轴示意图,其法兰面上的孔系的加工是在一台卧式单面七工位的机床上完成的,该机床用一个多轴头在5个加工工位上完成了5道加工工序。在加工工位之前有一个零件装卸工位,为了在装卸工位卸下工件,必须解决工件的返回问题。为此,我们设计了机械手在五个加工工位之后的等待工位抓取工件,并实现工件的返回。

目 录
1 绪论 1
1.1题目背景 1
1.2研究意义 1
1.3国内研究的情况 1
1.4国外研究情况 2
1.5本课题研究的主要内容 2
1.5.1凸轮轴机床的工作原理 2
1.5.2机械手总体结构的设计 3
2 机械手的总体设计 5
2.1机械手的设计原则 5
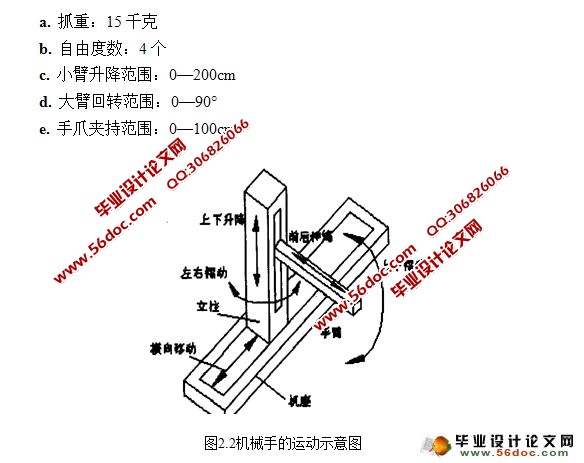
2.2机械手的座标型式与自由度 6
2.2.1确定大体参数 6
2.3机械手的手部结构方案设计 6
2.4机械手的手腕结构方案设计 7
2.5机械手的手臂结构方案设计 7
2.6机械手的控制方案设计 7
2.7机械手的主要技术参数 7
3 手部结构设计 9
3.1夹持式手部结构 9
3.1.1手指的形状和分类 9
3.1.2设计时考虑的几个问题 9
3.1.3手部夹紧液压缸的设计 10
4 手腕结构设计 14
4.1手腕的自由度 14
4.2手腕的驱动力矩的计算 14
4.2.1手腕转动时所需的驱动力矩 14
4.2.2回转液压缸的驱动力矩计算 16
4.2.3手腕回转缸的尺寸及其校核 17
5 手臂液压缸的尺寸设计与校核 19
5.1手臂伸缩液压缸的尺寸设计与校核 19
5.1.1手臂伸缩液压缸的尺寸设计 19
5.1.2尺寸校核 19
5.1.3导向装置 19
5.1.4平衡装置 20
5.2手臂升降液压缸的尺寸设计与校核 20
5.2.1尺寸设计 20
5.2.2尺寸校核 20
5.3手臂回转液压缸的尺寸设计与校核 21
5.3.1尺寸设计 21
5.3.2尺寸校核 21
6 机械手的PLC控制系统设计 23
6.1可编程序控制器的选择及工作过程 23
6.1.1可编程序控制器的选择 23
6.1.2可编程序控制器的工作过程 23
6.2可编程序控制器的使用步骤 24
6.3机械手可编程序控制器控制方案 24
6.3.1控制系统的工作原理及控制要求 25
结 论 26
致 谢 27
参考文献 28