
高炉上料机械手液压系统设计(含CAD零件装配图,SolidWorks三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
高炉上料机械手液压系统设计(含CAD零件装配图,SolidWorks三维图)(论文说明书10600字,CAD图纸14张,SolidWorks三维图)
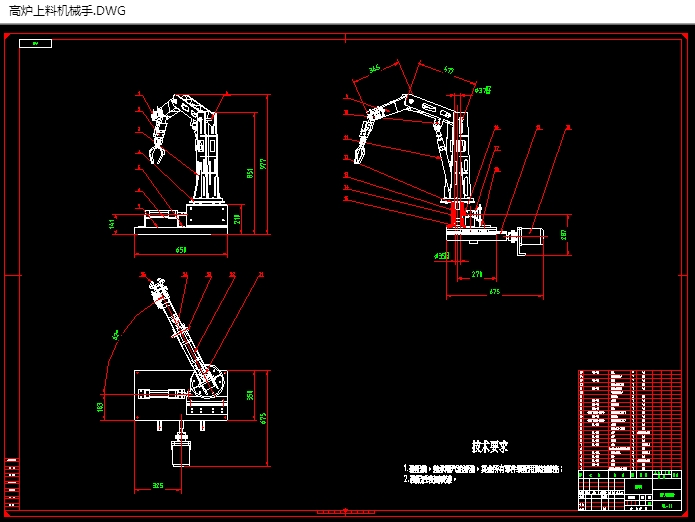
摘 要:本次毕业设计的题目是高炉上料机械手液压系统的设计,首先对高炉上料机械手的工况进行分析,此上料机械手完成小臂上下俯仰、大臂正反向回转、行走装置进退三个自由度,以及手爪的开启和闭合等动作,然后给出该高炉上料机械手的液压系统的电磁元件动作循序表和液压系统原理图。
本械手由大臂结构,小臂、旋转结构和驱动机构组成。该设计能实现三个自由度,分别为手爪的开合,旋转,小臂的上下摆动以及大臂的旋转等等功能。
关键词:高炉上料机械手,液压系统,自由度,功能
Abstract:This graduation project mainly had the numerical control engine bed and the programming introduction, the ear components tech nological analysis craft parameter choice cutting tool choice, the components procedure manual establishment, the procedure simulation, the modelling and the entity simulation processing finally has made the design summary,the acknowledgment language, the reference tabulation and the appendix.Article primary coverage for components craft analysis.
This components manual programming, but also has to make engineer's modelling and the entity simulation processing.Used the circular arc interpolation instruction in the components manual programming; drill hole; M98 transfer subroutine instruction.
Key words: auto-focus,Industrial robot ,degrees of freedom ,actuating mechanism. fucation
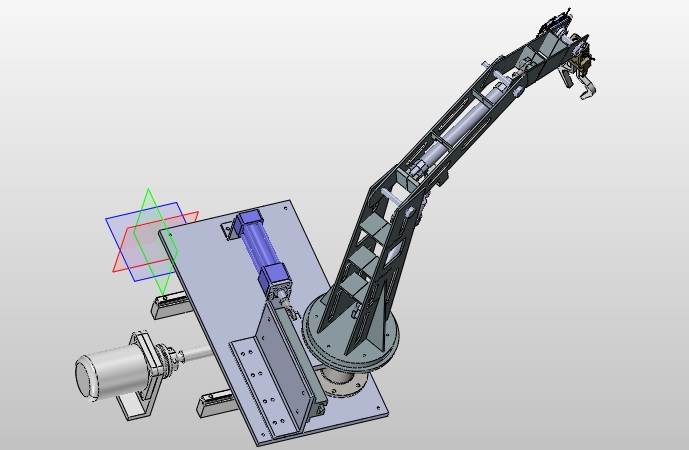
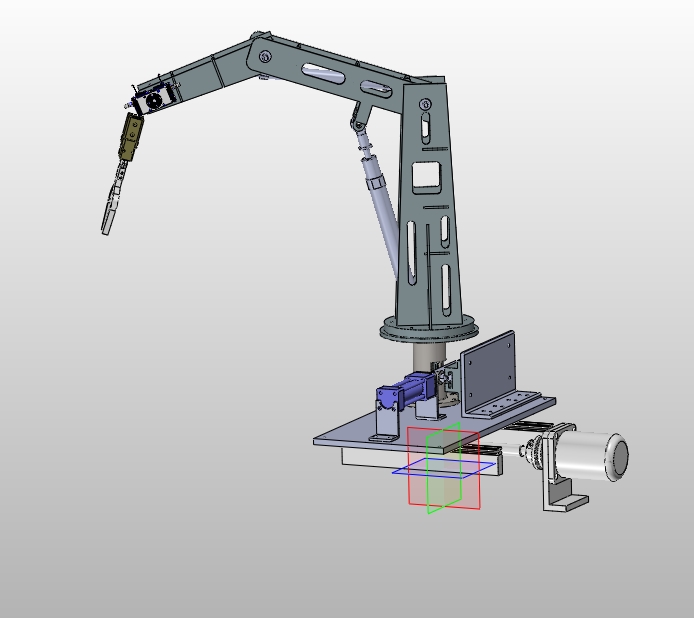
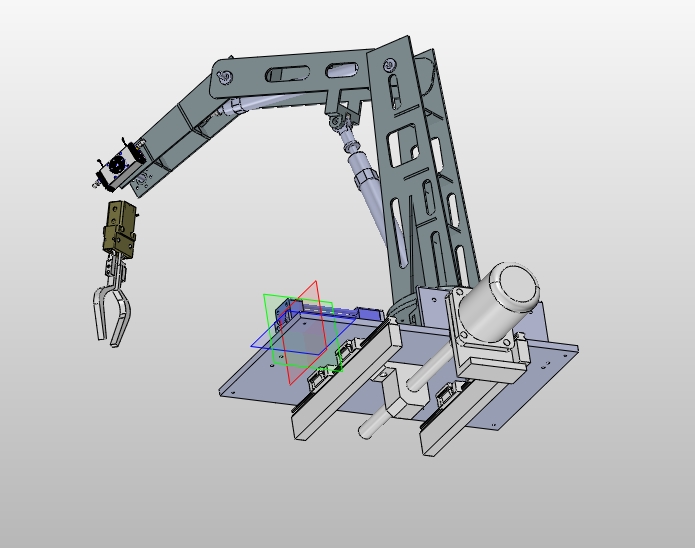
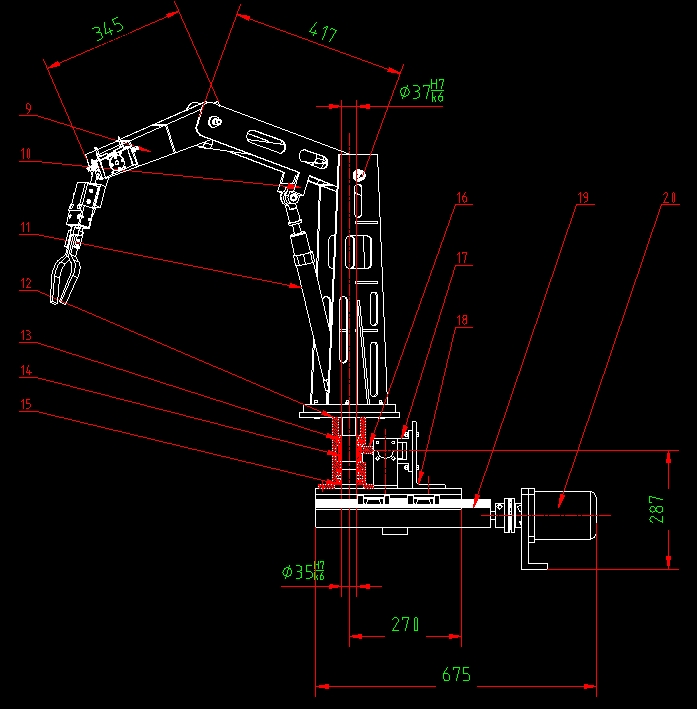
高炉上料机械手的工作原理
本次设计的高炉上料机械手主要由大臂结构,小臂、旋转结构和驱动机构以及直线导杆、滚珠丝杆等等组成。该设计能实现三个自由度,分别为手爪的开合,旋转,小臂的上下摆动以及大臂的旋转等等功能。当需要加持料到炉子里面的时候,伺服电机驱动滚珠丝杆螺母副动作,从而实现底座的移动,然后由液压缸驱动机械手的大臂、小臂动作,手部的夹爪夹住工件放到指定的位置,然后上料完成后,伺服电机反转,带动整个机械手后退,液压缸驱动机械手的大臂、小臂动作,如此循环。
目录
摘要 I
Abstract II
第一章 绪论 1
1.1本课题研究的内容 1
1.2国内外发展状况 2
1.3机械手的组成和分类 4
1.4液压传动的基础知识 6
第二章 高炉上料机械手的设计方案 8
2.1 高炉上料机械手的总体方案图 9
2.2 高炉上料机械手的工作原理 10
第三章 高炉上料机械手结构的设计 11
3.1夹持式手部结构 12
3.1.1手指的形状和分类 13
3.1.2设计时考虑的几个问题 14
3.1.3手部夹紧液压缸的设计 14
3.2液压缸驱动力矩的计算 16
3.3液压缸驱动力矩的计算校核 17
3.4 电机的选型计算 18
3.5 直线导杆的选型计算 20
第四章 高炉上料机械手中关键零部件的强度计算与校核 23
4.1齿轮的强度计算与校核 24
4.2轴的强度计算与校核 25
高炉上料机械手液压系统的设计 26
5.1液压系统原理图的确定 27
5.2电磁元件动作循序表的确定 29
总结 30
致谢 31
参考文献 32