
搬运式机械手课程设计(CAD,CAXA,零件图,装配图,电气图)
无需注册登录,支付后按照提示操作即可获取该资料.
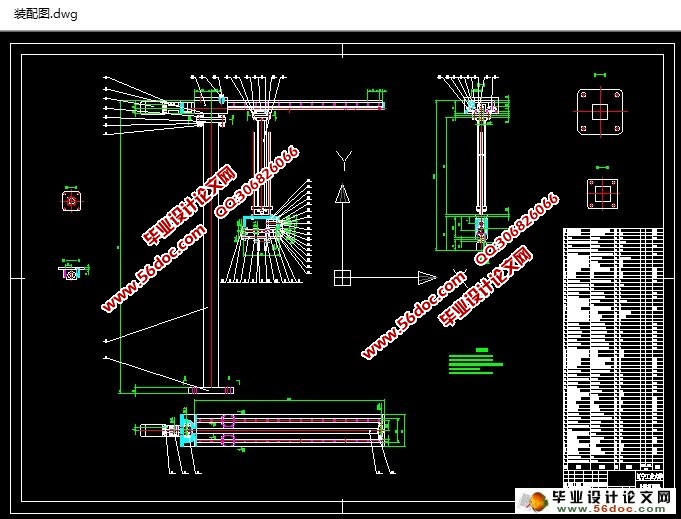
搬运式机械手课程设计(CAD,CAXA,零件图,装配图,电气图)(设计说明书4800字,CAD7张,CAXA图7张,电气图,零件图,装配图)
题目: 搬运机械手
技术参数:1、抓重:19000g (夹持式手部)
2、自由度数:2个自由度
3、坐标型式:直角坐标型
4、横臂手臂长度:1000mm
5、手臂最大高度:1500mm
要求:将工件从一个固定位置移动到另外固定位置

目 录
第1章 绪论………………………………………………………………………………1
1.1 机械手的现状……………………………………………………………………1
1.2 选题意义…………………………………………………………………...…….1
第2章 总体方案设计…………………………………………………………………...3
2.1 研究机械手……………………………………………………………………….3
2.2 机械手基本形式选择…………………………………………………………….3
2.3总体布置设计,画出总体布置图………………………………………….…….4
第3章 机械系统的设计计算…………………………………………………..………5
3.1.1 动力电机的选择…………………………………………………………….…...5
3.1.2械手夹持范围设计………………………………………………………….……5
3.2.1滑动丝杠设计计算…………………………………………………….………....6
3.2.2 电机的选择……………………………………………………………….….......7
3.2.3 直臂气缸的选择…………………………………………………………….…...8
3.2.4 机械手臂设计……………………………………………………………….…...9
3.3 电机联轴器的选择………………………………………………………...........12
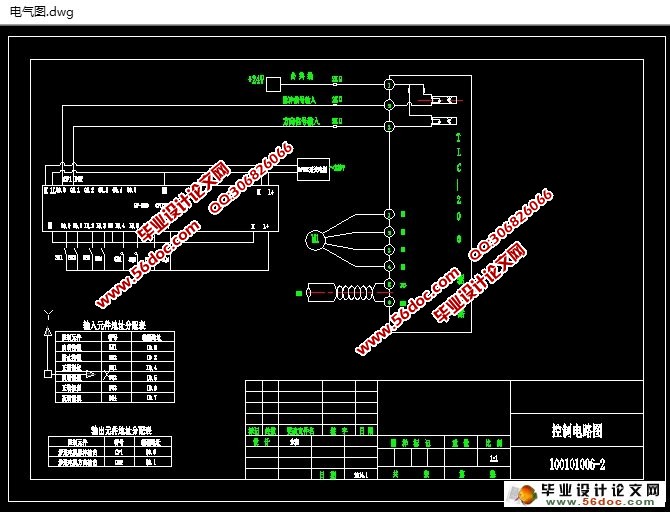
第4章 控制系统的设计………………………………………………………..............14
4.1控制器的选择………………………………………………………………..........15.
4.2 控制器结构…………………………………………………………………….…16
第5章 结论………………………….…………………………………..…………...........17
参考文献……………………………………………………………………...…………….18