
多爪自动搬运机器人设计(含cad零件图和装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
多爪自动搬运机器人计(含cad零件图和装配图)(任务书,毕业论文说明书19000字,CAD图纸6张)
摘 要:国内外大学生智能机器人是一个多种高新技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。本文是以第十届亚太机器人大赛为背景而设计的自动机器人,它采用合理的机构,经过巧妙的结合,而达到精确快速完成任务的要求。
关键词:机器人;机构;准确;快速
More Claws Automatic Handling Robot
Abstract:the college 's high-tech intelligent robot is a multi-body integration at home and abroad, which combines knowledge of mechanics, electronics, sensors, computer hardware, software, artificial intelligence and many other disciplines,and involves many of today's technology in the frontier. This article is based on the Tenth Asia-Pacific Robot Contest ,and designed a automatical robot,the robot use rational structure, by the combination of ingenious,it can complete the task precisely and rapidly.
Key words:Robot;Agencies;Accurate;Fast
主要内容和要求
1. 该设计主要来源于第十届亚太区大学生自制机器人比赛主题,主要设计一个自动机器人,该机器人能够按大赛要求制作的水灯花瓣及烛台自动搬运到指定位置”。
2.该机器人能够在二十秒钟内完成道具的搬运工作;
3. 该机器人重量不得超过三十斤;
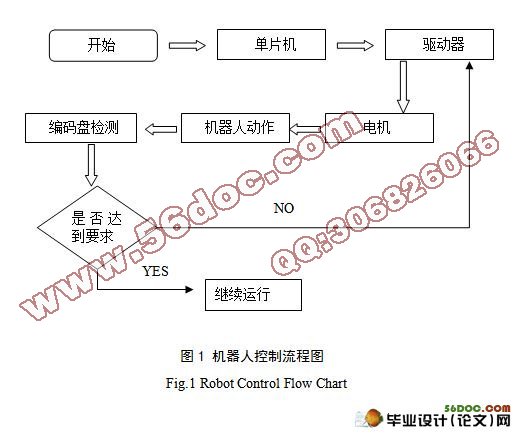
4.该机器人采用单片机或者ARM3作为处理器,空心杯电机作为驱动动力、采用光电编码盘作为检测手段、红外测距传感系统,辅以电源监控电路、伺服控制电路构成机器人控制硬件电路系统;
5.机器人应带有自适应场地、灯光设计,以适应不同场地;


目 录
摘 要 1
关键词 1
1前言 1
2总体方案的设计 2
2.1总体设计图........................................................2
2.2机器人设计的要求..................................................2
2.3机器人设计的原则..................................................3
3机器人机械设计 3
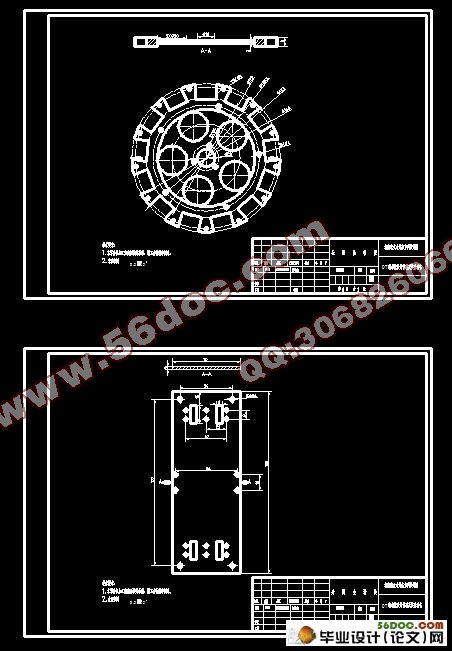
3.1底盘和轮子的选择与设计 3
3.2各轮系的结构和特性 6
3.3升降体设计 7
3.4 传动设计...................................................9
3.5 滑块设计...................................................9
3.6 爪子的设计思路...................................................9
3.7 爪子托盘的设计..................................................10
3.8摇杆设计...................................................11
4电子硬件.............................................................12
4.1动力轮电机的选择.................................................12
4.2电机伺服器控制 13
4.3编码盘采样 15
4.4光电传感器.......................................................16
5机器人主控制板硬件设计...............................................18
5.1主控板硬件实物图.................................................18
5.2 AVR电源模块.....................................................18
5.3最小系统.........................................................18
5.4人机交互界面.....................................................19
6总结.................................................................24
参考文献 24
致谢 25
附录 26