
基于AMEsim和Simulink的汽车电动助力转向控制系统仿真研究
无需注册登录,支付后按照提示操作即可获取该资料.
基于AMEsim和Simulink的汽车电动助力转向控制系统仿真研究(任务书,开题报告,中期检查表,毕业论文说明书21000字)
摘 要
未来汽车的发展主题就是“安全、节能、环保”。汽车电动助力转向系统正是紧扣这一主题的高新技术。汽车电动助力转向系统的目的是提高整车的轻便性和操纵稳定性。其解决的关键问题之一是如何根据具体的车速与方向盘扭矩的大小,确定助力电机输出的力矩即转向助力特性曲线。为解决此问题并节约系统的开发成本需利用先进的计算机技术,实施仿真手段,加快系统的开发进度。
AMESim软件是法国IMGINE公司开发的一套完备的面向工程设计的高级建模仿真软件,它能对任何元件和系统的动态性能进行仿真计算,能为工程设计提供快速、准确的解决方案。该软件的另外一个突出特点是提供了与包括Simulink和Admas等在内的多种软件的接口,通过设置接口,可以实现AMESim与其他软件的联合仿真,从而使得仿真过程更加简单、准确。
本文给出了电动助力转向系统的动力学模型,并对组成该系统的各个部件进行了逐一分析,给出了各个部件的动力学方程,利用仿真软件AMESim建立了EPS的仿真模型,其中EPS的机械部分在AMESim中完成,而控制部分在Simulink中实现,在Matlab/Simulink下建立了目标电流算法的控制模型,并采用PID控制算法进行了仿真研究,验证了控制策略正确性。最后的仿真结果表明:所设计的系统在汽车低速行驶时,助力效果明显,在汽车高速行驶时,助力电机提供一定的阻力矩,帮助驾驶员获得更好的路感,并且比较了不同车速下的助力特性曲线,表明助力扭矩随着车速的增加而减小,这也与所设计的转向系统的控制策略相吻合。
关键词:电动助力转向;AMESim;Simulink;PID控制算法;联合仿真
ABSTRACT
The develop theme of the future Automobile is "safe, energy-saving, environmental protection".The auto electric power steering system is closely this theme and high and new technology.The auto electric power steering system to improve the vehicle steering stability and portability.The solution is one of the key problems of how to specific to the speed and the size of the steering wheel torque, sure power output torque motor is steering characteristic curve. To resolve the issue and save the system development costs need to use of advanced computer technology, the implementation of the simulation method, speed up the progress of the development of the system.
AMESim software is France m team developed a set of IMGINE of complete for the engineering design of the senior modeling simulation software, it can to any components and system dynamic performance simulation calculation, for engineering design provides a quick and accurate solution. The software of another outstanding characteristic is provided and including Simulink and Admas, a variety of software interface, through the Settings interface, can realize AMESim and other joint simulation software, so that the simulation process is more simple and accurate.
In this paper, electric power steering system dynamics model, and the system of the various components by analysis, gives each component dynamics equations, using the simulation software AMESim established EPS simulation model, including the EPS mechanical parts of the AMESim in complete, and the control part in Simulink reality, in Matlab/Simulink established under the control model of target current algorithm, and PID control algorithm simulation results demonstrate that the control strategy is correct. The last of the simulation results show that: the system designed car driving in low speed, power has obvious effect, in car a high speed, and help provide certain resistance torque motor, to help drivers get better way feeling, and compared the different speed of dynamical characteristics curve, the results show that the power of the speed increase with torque is reduced, this also with the design of steering system control strategy are identical with each other.
Keywords:Electric Power Steering;AMESim;Simulink;PID Control Algorithms; Unitedsimulation
论文的主要工作内容
1.研究汽车行驶状态参数,汽车的状态参数包括:汽车发动机信号、车速信号、点火信号、转向电机电磁离合器信号等;
2.汽车电动助力转向系统的工作原理;
3.采用AMEsim进行电动助力转向系统结构仿真的方法;
4.采用Simulink设计电动助力转向系统控制策略的方法;
5.基于AMEsim和Simulink的汽车电动助力转向控制系统的联合仿真分析方法。
目 录
摘要.............................................................................................................................Ⅰ
Abstract.......................................................................................................................Ⅱ
第1章 绪论 1
1.2 电动助力转向系统 2
1.2.1 电动助力转向系统的分类 2
1.2.2 电动助力转向系统的特点 3
1.2.3 电动助力转向系统的关键技术 4
1.3 EPS系统的国内研究现状 5
1.4 EPS系统的国外研究现状 6
1.5 EPS系统的发展趋势 6
1.6 论文的主要工作内容 7
第2章 电动助力转向系统的动力模型 8
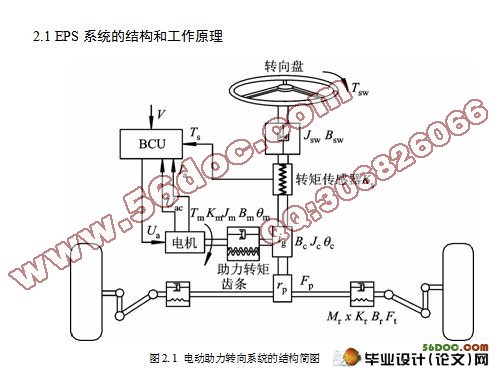
2.1 EPS系统的结构和工作原理 8
2.2 EPS系统的各组成部分的数学模型 9
2.2.1 EPS系统的机械部分的动力学模型 9
2.2.2 直流电动机模型 11
2.2.3 闭环电流离散PID控制模型 12
2.2.4 脉宽调制(PWM)模型 12
2.3 EPS系统的助力特性分析 13
2.4 EPS系统的控制模式和控制策略分析 15
2.4.1 EPS系统的控制模式 15
2.4.2 EPS系统电流闭环控制策略 16
2.5本章小结 18
第3章 基于AMEsim和Simulink的电动助力转向系统的仿真研究 19
3.1 AMEsim仿真工具简介 19
3.2 AMEsim与MATLAB的接口设置 20
3.2.1 联合仿真的意义 20
3.2.2 AMEsim与MATLAB的接口设置 20
3.2.3 联合仿真中需要注意的问题 21
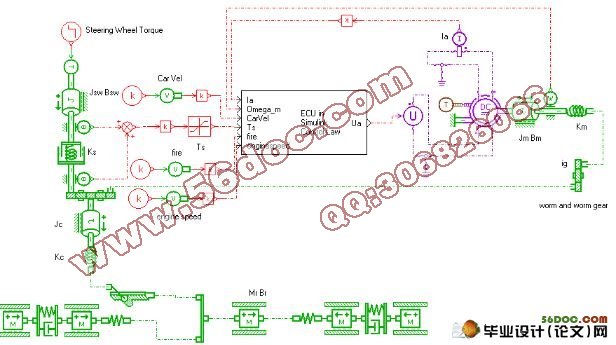
3.3 EPS系统的AMEsim模型 22
3.3.1 EPS系统模型中的关键部件介绍 22
3.3.2 电机控制模块 25
3.3.3 ECU模型简介 26
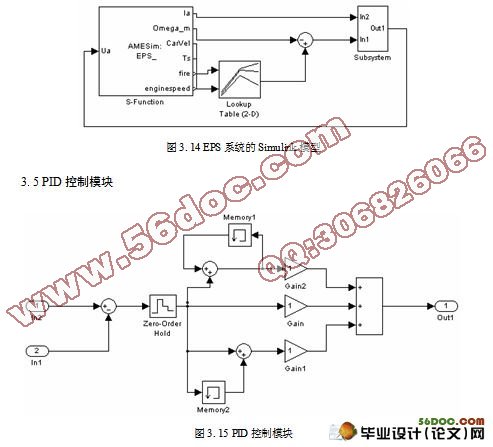
3.4 EPS系统的Simulink模型 27
3.5 PID控制模块 28
3.6本章小结 28
第4章 仿真实验过程 30
4.1 EPS系统在有无PID控制下的助力特性曲线 30
4.2 EPS系统在不同车速下的助力特性曲线 31
4.3 EPS系统在脉冲信号输入下的助力特性曲线 33
4.4本章小结 33
结论 35
参考文献 37
致谢 39