
ЖргУЭОЦјЖЏЛњЦїШЫНсЙЙЩшМЦ(PLC)
ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
ЖргУЭОЦјЖЏЛњЦїШЫНсЙЙЩшМЦ
еЊвЊ БОЮФМђвЊНщЩмСЫЙЄвЕЛњЦїШЫЕФИХФюЃЌЛњаЕЪжгВМўКЭШэМўЕФзщГЩЃЌМДPLCПижЦЕФЦјЖЏЛњаЕЪжЕФЯЕЭГЙЄзїдРэЃЌЛњаЕЪжИїИіВПМўЕФећЬхГпДчЩшМЦЃЌЦјЖЏММЪѕЕФЬиЕуЃЌPLCПижЦЕФЬиЕуЁЃБОЮФЖдЛњаЕЪжНјаазмЬхЗНАИЩшМЦЃЌШЗЖЈСЫЛњаЕЪжЕФзјБъаЮЪНКЭздгЩЖШЃЌШЗЖЈСЫЛњаЕЪжЕФММЪѕВЮЪ§ЁЃЭЌЪБЃЌЩшМЦСЫЛњаЕЪжЕФМаГжЪНЪжВПНсЙЙЃЌЩшМЦСЫЛњаЕЪжЕФЪжЭѓНсЙЙЃЌМЦЫуГіСЫЪжЭѓзЊЖЏЪБЫљашЕФЧ§ЖЏСІОиКЭЛизЊЦјИзЕФЧ§ЖЏСІОиЁЃЩшМЦСЫЛњаЕЪжЕФЪжБлНсЙЙЁЃЩшМЦГіСЫЛњаЕЪжЕФЦјЖЏЯЕЭГЃЌЛцжЦСЫЛњаЕЪжЦјбЙЯЕЭГЙЄзїдРэЭМЃЌДѓДѓЬсИпСЫЛцЭМаЇТЪКЭЭМжНжЪСПЁЃРћгУПЩБрГЬађПижЦЦїЖдЛњаЕЪжНјааПижЦЃЌбЁШЁСЫКЯЪЪЕФPLCаЭКХЃЌИљОнЛњаЕЪжЕФЙЄзїСїГЬжЦЖЈСЫПЩБрГЬађПижЦЦїЕФПижЦЗНАИЃЌЛГіСЫЛњаЕЪжЕФЙЄзїЪБађЭМЃЌВЂЛцжЦСЫПЩБрГЬађПижЦЦїЕФПижЦГЬађЁЃ(гХауБЯвЕЩшМЦЭј www.2bysj.cn)
ЙиМќДЪЃК ЙЄвЕЛњЦїШЫ ЛњаЕЪж ЦјЖЏ ПЩБрГЬађПижЦЦїЃЈPLCЃЉ
Structural Design of Multi-purpose Pneumatic Robot
Abstract At first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development briefly. WhatЁЏs more, the paper accounts for the background and the primary mission of the topic. The paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm.The paper designs the system of air pressure drive and draws the work principle chart, the manipulator uses PLC to control. The paper institutes two control schemes of PLC according to the work flow of the manipulator. The paper draws out the work time sequence chart and the trapezium chart. WhatЁЏs more, the paper workout the control program of the PLC,
KEY WORDS: industrial robot manipulator pump air pressure drive PLC
ПЮЬтЕФЩшМЦвЊЧѓ
БОПЮЬтНЋвЊЭъГЩЕФжївЊШЮЮёШчЯТ:
(1)ЛњаЕЪжЮЊЭЈгУЛњаЕЪжЃЌвђДЫЯрЖдгкзЈгУЛњаЕЪжРДЫЕЃЌЫќЕФЪЪгУУцЯрЖдНЯЙуЁЃ
(2)бЁШЁЛњаЕЪжЕФзљБъаЭЪНКЭздгЩЖШЁЃ
(3)ЩшМЦГіЛњаЕЪжЕФИїжДааЛњЙЙЃЌАќРЈ:ЪжВПЁЂЪжЭѓЁЂЪжБлЕШВПМўЕФЩшМЦЁЃЮЊСЫЪЙЭЈгУадИќЧПЃЌЪжВПЩшМЦГЩПЩИќЛЛНсЙЙЃЌВЛНіПЩвдгІгУгкМаГжЪНЪжжИРДзЅШЁАєСЯЙЄМўЃЌдкЙЄвЕашвЊЕФЪБКђЛЙПЩвдгУЦјСїИКбЙЪНЮќХЬРДЮќШЁАхСЯЙЄМўЁЃ(гХауБЯвЕЩшМЦЭј www.2bysj.cn)
(4)ЦјбЙДЋЖЏЯЕЭГЕФЩшМЦ
БОПЮЬтНЋЩшМЦГіЛњаЕЪжЕФЦјбЙДЋЖЏЯЕЭГЃЌАќРЈЦјЖЏдЊЦїМўЕФбЁШЁЃЌЦјЖЏЛиТЗЕФЩшМЦЃЌВЂЛцГіЦјЖЏдРэЭМЁЃ
(5)ЛњаЕЪжЕФПижЦЯЕЭГЕФЩшМЦ
БОЛњаЕЪжФтВЩгУПЩБрГЬађПижЦЦї(PLC)ЖдЛњаЕЪжНјааПижЦЃЌБОПЮЬтНЋвЊбЁШЁPLCаЭКХЃЌИљОнЛњаЕЪжЕФЙЄзїСїГЬБржЦГіPLCГЬађЃЌВЂЛГіЬнаЮЭМЁЃ
ЦјЖЏЛњаЕЪжЕФЙЄзїСїГЬШчЯТЃК
ЃЈ1ЃЉ ЕБАДЯТЛњаЕЪжЦєЖЏАДХЅжЎКѓЃЌЪзЯШСЂжљгвзЊЕчДХЗЇЭЈЕчЃЌЛњаЕЪжгвзЊЃЌжСгвЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ2ЃЉ СЂжљЩЯЩ§ЕчДХЗЇЭЈЕчЃЌСЂжљЩЯЩ§ЃЌжСЩЯЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ3ЃЉ ЪжБлЩьГЄЕчДХЗЇЭЈЕчЃЌЪжБлПЊЪМЩьГЄЃЌжСЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ4ЃЉ ЪжЭѓФцЪБеызЊЕчДХЗЇЭЈЕчЃЌЪжЭѓФцЪБеызЊЖЏЃЌжСФцЪБеызЊЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ5ЃЉ СЂжљЯТНЕЕчДХЗЇЭЈЕчЃЌСЂжљЯТНЕЃЌжСЯТЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ6ЃЉ ЪжзІзЅНєЕчДХЗЇЭЈЕчЃЌЪжзІзЅНєЃЌжСЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ7ЃЉ СЂжљЩЯЩ§ЕчДХЗЇЭЈЕчЃЌСЂжљЩЯЩ§ЃЌжСЩЯЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ8ЃЉ ЪжЭѓФцЪБеызЊЕчДХЗЇЭЈЕчЃЌЪжЭѓФцЪБеызЊЖЏЃЌжСФцЪБеызЊЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ9ЃЉ ЪжЭѓЪеЫѕЕчДХЗЇЭЈЕчЃЌЪжЭѓЪеЫѕЃЌжСЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ10ЃЉ СЂжљзѓзЊЕчДХЗЇЭЈЕчЃЌЛњаЕЪжзѓзЊЃЌжСзѓЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ11ЃЉ ЪжБлЩьГЄЕчДХЗЇЭЈЕчЃЌЪжБлПЊЪМЩьГЄЃЌжСЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ12ЃЉ ЪжЭѓФцЪБеызЊЕчДХЗЇЭЈЕчЃЌЪжЭѓФцЪБеызЊЖЏЃЌжСФцЪБеызЊЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ13ЃЉ СЂжљЯТНЕЕчДХЗЇЭЈЕчЃЌСЂжљЯТНЕЃЌжСЯТЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ14ЃЉ ЪжзІЫЩПЊЕчДХЗЇЭЈЕчЃЌЪжзІЫЩПЊЃЌжСЯоЮЛПЊЙиЖЏзїЁЃ
ЃЈ15ЃЉ ЪжЭѓЪеЫѕЕчДХЗЇЭЈЕчЃЌЪжЭѓЪеЫѕЃЌжСЯоЮЛПЊЙиЖЏзїЁЃЭъГЩвЛДЮбЛЗЃЌШЛКѓжиИДвдЩЯбЛЗЖЏзїЁЃ
ЃЈ16ЃЉ АДЯТЭЃжЙАДХЅЛђЭЃЕчЪБЃЌЛњаЕЪжЭЃжЙдкЯжааЕФЙЄВНЩЯЃЌжиаТЦєЖЏЪБЃЌЛњаЕЪжАДЩЯвЛЙЄВНМЬајЙЄзїЁЃ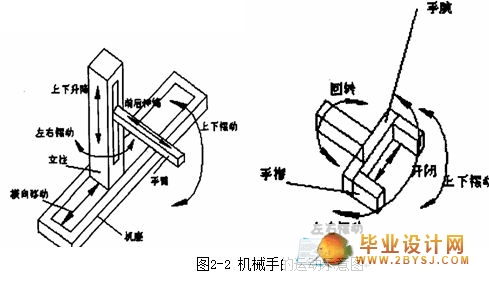


ФП ТМ
ЕквЛеТ в§бд
1.1ЛњаЕЪжИХЪі............................................... ..............1ЁЁ
1.2ЦјЖЏЛњаЕЪжЕФЩшМЦвЊЧѓЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ2
1.3ЛњаЕЪжЕФЯЕЭГЙЄзїдРэМАзщГЩ.....................................ЃЎ.......2
ЕкЖўеТ ЛњаЕЪжЕФећЬхЩшМЦЗНАИ
2.1ЛњаЕЪжЕФзљБъаЭЪНгыздгЩЖШ ЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ6
2.2ЛњаЕЪжЕФЪжВПНсЙЙЗНАИЩшМЦ ЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ7
2.3ЛњаЕЪжЕФЪжЭѓНсЙЙЗНАИЩшМЦЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ7
2.4ЛњаЕЪжЕФЪжБлНсЙЙЗНАИЩшМЦЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ7
2.5ЛњаЕЪжЕФЧ§ЖЏЗНАИЩшМЦЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ7
2.6ЛњаЕЪжЕФПижЦЗНАИЩшМЦЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ8
2.7ЛњаЕЪжЕФжївЊММЪѕВЮЪ§ЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ8
ЕкШ§еТ ЪжВПНсЙЙЩшМЦ
3.1МаГжЪНЪжВПНсЙЙЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ10 3.1.1ЪжжИЕФаЮзДКЭЗжРр
3.1.2ЩшМЦЪБПМТЧЕФМИИіЮЪЬт
3.1.3ЪжВПМаНєЦјИзЕФЩшМЦ
ЕкЫФеТ ЪжЭѓНсЙЙЩшМЦ
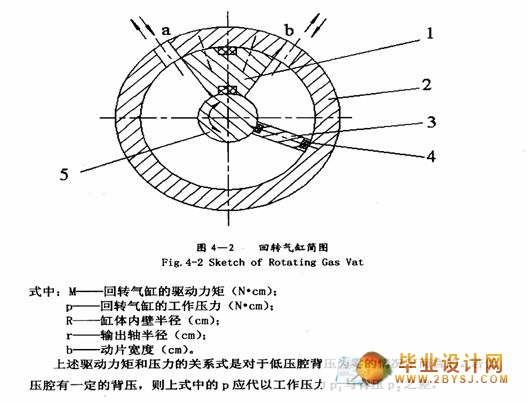
4.1ЪжЭѓЕФздгЩЖШЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ14
4.2ЪжЭѓЕФЧ§ЖЏСІОиЕФМЦЫуЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ14
4.2.1ЪжЭѓзЊЖЏЪБЫљашЕФЧ§ЖЏСІОи
4.2.2ЛизЊЦјИзЕФЧ§ЖЏСІОиМЦЫу
4.2.3ЛизЊЦјИзЕФЧ§ЖЏСІОиМЦЫуаЃКЫ
ЕкЮхеТ ЪжБлЩьЫѕЃЌЩ§НЕЃЌЛизЊЦјИзЕФЩшМЦгыаЃКЫ
5.1ЪжБлЩьЫѕВПЗжГпДчЩшМЦгыаЃКЫЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ20
5.1.1ГпДчЩшМЦ
5.1.2ГпДчаЃКЫ
5 .1 .3ЕМЯђзАжУ
5 .1 .4ЦНКтзАжУ
5.2ЪжБлЩ§НЕВПЗжГпДчЩшМЦгыаЃКЫЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ21
5.2.1ГпДчЩшМЦ
5.2.2ГпДчаЃКЫ
5.3ЪжБлЛизЊВПЗжГпДчЩшМЦгыаЃКЫЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ23
5.3.1ГпДчЩшМЦ
5.3.2ГпДчаЃКЫ
ЕкСљеТ ЦјЖЏЯЕЭГЩшМЦ
6.1ЦјбЙДЋЖЏЯЕЭГЙЄзїдРэЭММАдЊЦїМўЕФбЁдёЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ25
ЕкЦпеТ ЛњаЕЪжЕФPLCПижЦЯЕЭГЩшМЦ
7.1ПЩБрГЬађПижЦЦїЕФбЁдёМАЙЄзїЙ§ГЬЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ26
7.1.1ПЩБрГЬађПижЦЦїЕФбЁдё
7.1.2ПЩБрГЬађПижЦЦїЕФЙЄзїЙ§ГЬ
7.2ПЩБрГЬађПижЦЦїЕФЪЙгУВНжшЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ27
7.3ЛњаЕЪжПЩБрГЬађПижЦЦїПижЦЗНАИЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ28
7.3.1ПижЦЯЕЭГЕФЙЄзїдРэМАПижЦвЊЧѓ
7.3.2 ЦјЖЏЛњаЕЪжЕФЙЄзїСїГЬ
7.3.3 I/0ЗжХф
7.3.4ЬнаЮЭМЩшМЦ
ЕкАЫеТ НсТлЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ36
жТаЛЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ37
ВЮПМЮФЯзЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎЃЎ38