
西门子PLC的步进电机直接控制(S7―200)
无需注册登录,支付后按照提示操作即可获取该资料.
摘 要
本文根据传统步进电机控制中的不足和缺点,将PLC直接控制技术运用于步进电机的控制。该系统解决了传统控制技术中的各部分硬件的设计、选型、接口匹配往往要花费设计者一很大的精力和劳动,接口信号的匹配以及各器件的质量等对整个系统的可靠性影响很大等缺点。
本文根据PLC控制步进电机的控制特点及其原理,把软件控制和硬件电路互相结合起来,形成整体的控制,有效的克服了它们的缺点而发挥了它们的优势。本文详细阐述了该系统中PLC(西门子)直接控制步进电机的实现方法、系统的各部件的组成、各部件的连接情况。
关键字:西门子PLC;步进电机调速; 步进电机;
ABSTRACT
This text treads to control into the electrical engineering according to the tradition medium of shortage and weakness, control PLC directly technique usage in tread into the control of electrical engineering.
That system solved a tradition a control a technique in of the design of each parts of hard wares, choose a type and connect to match to usually need to cost a design one very big energy and labor, connect message number to match and the quality of each spare part wait to the whole system of the credibility influence to wait weakness very greatly
This text treads into control characteristics and its principle of electrical engineering according to the PLC control, combining together with each other the software control and the hardware electric circuit, becoming a whole control, overcoming their weakness but developing their advantages effectively. This text elaborated that system in detail to tread and carry out each parts of the method, system and constitute into the electrical engineering in the PLC (Siemens) direct control, the conjunction circumstance of each parts.
KEY WORDS:Siemens PLC; Tread into the electrical engineering adjust soon; Tread into the electrical engineering.
步进电动机是一种将数字脉冲信号转换成机械角位移或者线位移的数模转换元件。在经历了一个大的发展阶段后, 目前其发展趋于平缓。然而, 由于步进电动机的工作原理和其它电动机有很大的差别, 具有其它电动机所没有的特性。因此,沿着小型、高效、低价的方向发展。
步进电动机由此而得名。步进电动机的运行是在专用的脉冲电源供电下进行的, 其转子走过的步数, 或者说转子的角位移量, 与输入脉冲数严格成正比。另外, 步进电动机动态响应快, 控制性能好, 只要改变输入脉冲的顺序, 就能方便地改变其旋转方向。这些特点使得步进电动机与其它电动机有很大的差别。因此, 步进电动机的上述特点, 使得由它和驱动控制器组成的开环数控系统, 既具有较高的控制精度,良好的控制性能, 又能稳定可靠地工作。因此, 在数字控制系统出现之初, 步进电动机经历过一个大的发展阶段。
步进电机是将电脉冲信号转成角位移或线位移的电磁机械装置,是一种输出与输入数字脉冲相对应的增量式数字元件。在数控机床、绘图机、打印机等方面应用广泛。它也可以看作是一种特殊的同步电机;它具有快速起停、精确步进及直接接收数字量的特点,它的步距角和转速不受电压波动和负载变化的影响,也不受环境条件如温度、气压、冲击、和振动等影响,仅与脉冲频率有关,这些特点使它完全适用于数字控制的系统中作为伺服元件,并使整个系统大为简化而又运行可靠。
本课题选用了最常见的一种小步距角的三相反应式步进电机其剖面图。电机的定子上有6个等分的磁极,相邻两个磁极间的夹角为60度。磁极上装有控制绕组并联成A, B, C三相。转子上均匀分布40个齿,每个齿的齿距为9度。定子每段极弧上也有5个齿,定、转子的齿宽和齿距都相同。每个定子磁极的极距为60度,所以每个极距所占的齿距数不是整数。当A极下的定、转子齿对齐,B极和C极下的齿就分别和转子齿相错三分之一的转子齿距,即为3度。这时若给B相通电,电机中产生沿B极轴线方向的磁场,因磁通要按磁阻最小的路径闭合,就使转子受到反应转距(磁阻转距)的作用而转动,直到转子齿和B极上的齿对齐为止。此时,A极和C极下的齿又分别与转子齿相错三分之一的转子齿距。由此可见:错齿是促使步进电机旋转的根本原因。若断开B相控制绕组,而接通C相控制绕组,这时电机中产生沿C极轴线方向的磁场。同理,在反应转距(磁阻转距)的作用下,转子按顺时针方向转过3度,使定子C极下的齿与转子齿对齐。以此类推,当控制绕组按A->B->C->A顺序循环通电时转子就沿着顺时针方向以每个脉冲转动3度的规律转动起来。若改变通电顺序,即按A->C->B->A顺序循环通电时,转子便按逆时针方向同样以每个脉冲转动3度。这就是单三拍通电方式。若采用三相单、双六拍通电方式运行,即A->AB->B->BC->C->CA->A顺序循环通电,步距角将减小一半,即每个脉冲转过1.5度。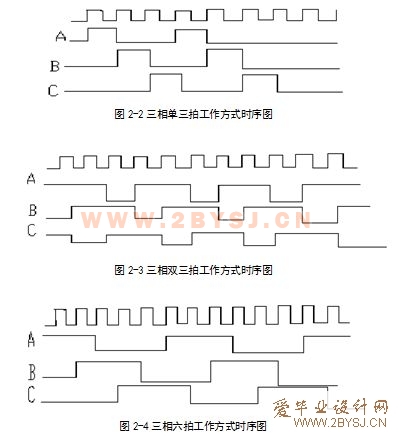

目 录
摘 要 III
ABSTRACT IV
第一章 绪 论 1
1.1引言 1
第二章 方案论证比较设计 3
2.1PLC技术的发展概述 3
2.2PLC技术在步进电机控制中的发展状况 4
2.3步进电机的发展状况 5
2.4 步进电机的工作原理 7
2.5步进电机的控制和驱动方法简介 8
第三章 步进电机工作方式的选择 9
3.1常见的步进电机的工作方式 9
3.2控制步进电机换向顺序 10
3.3控制步进电机的转向 10
3.4控制步进电机的速度 10
3.5西门子PLC控制步进电机的设计思路 10
3.5.1步进电机控制方式 11
3.5.2西门子PLC控制步进电机 12
3.6毕业设计任务 14
第四章 S7―200直接控制步进电机硬件设计 15
4.1s7―200的介绍 15
4.1.1性能 17
(爱毕业设计网 www.2bysj.cn)
4.1.2西门子 PLC 应用中需要注意的问题 18
4.1.3控制系统中干扰及其来源 18
4.1.4主要抗干扰措施 19
4.1.5I/O 端的接线 19
4.1.6正确选择接地点以完善接地系统 20
4.2步进电机的具体控制原理 20
4.3 步进电机的选择 21
4.4 步进电机驱动电路设计 21
4.4.1功率放大器件驱动电机 21
4.4.2 PLC直接驱动电机 25
第五章 控制系统的软件设计 27
5.1控制脉冲的产生 27
5.2步进电机的旋转方向和时序脉冲的关系 29
5.3 步数的确定 29
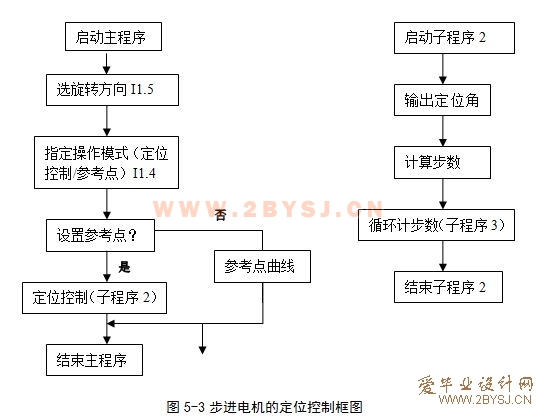
5.4定位控制 30
5.5步进电机的变速控制 31
第六章 本设计相关控制简介 35
6.1初始化 35
6.2 设置和取消参考点 35
6.3定位控制 35
6.4选择旋转方向 36
6.5起动电机 36
6.6停止电机 36
6.7联锁 37
(爱毕业设计网 www.2bysj.cn)
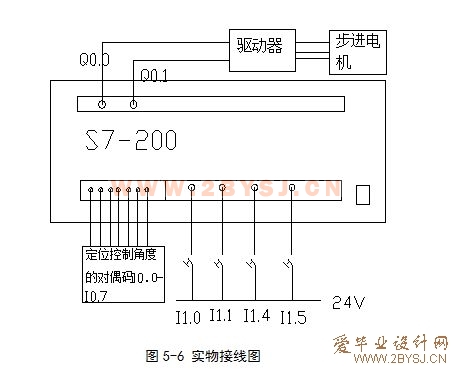
6.8硬件接口定义 37
第七章 设计总结 38
参考文献 39
致 谢 40
附录 41
20000字