
汽车电动转向器动力学建模与控制仿真研究(MATLAB仿真)
无需注册登录,支付后按照提示操作即可获取该资料.
汽车电动转向器动力学建模与控制仿真研究(MATLAB仿真)(任务书,开题报告,外文翻译,计划进度表,毕业论文12000字,相关框图和参数)
摘 要
汽车电动转向器是一种新型的汽车转向助力系统。
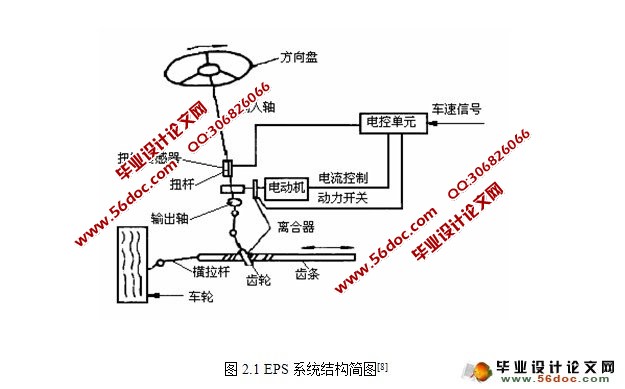
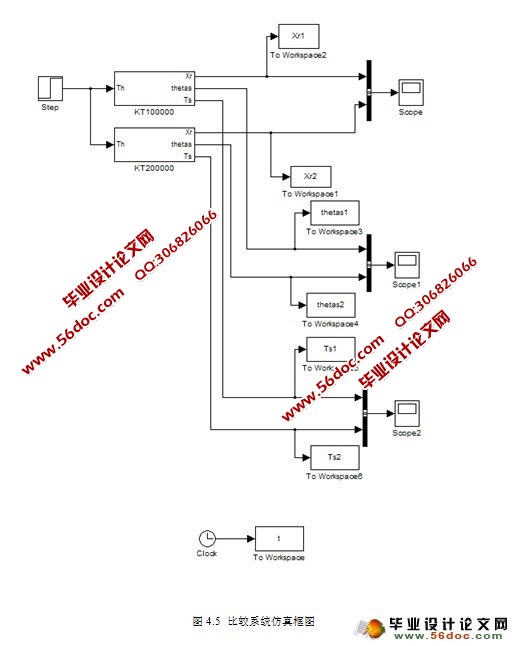
文章先对EPS系统原理及结构进行说明,介绍了三种EPS典型助力曲线,建立了机械转向系统数学模型、EPS系统数学模型,文中提出了EPS系统控制目标,说明了EPS系统的PID控制策略,介绍了电动助力转向系统中的三种控制模式:助力控制模式,回正控制模式,阻尼控制模式,文章重点研究助力控制。并建立了机械转向系统、EPS系统和基于PID控制的系统三种数学模型,然后应用MATLAB的Simulink模块进行运动仿真,通过调整参数和分析参数,来研究系统稳定性随参数变化的影响。仿真结果表明,所设计的PID控制对能对转向系统模型进提供助力控制,同时能使系统满足很好的动态性能。
关键词:电动转向器;助力控制;MATLAB/Simulink;仿真
Abstract
Electric Power Steering is a new automotive power steering system.
This article first on the principle and structure of EPS system are described, three kinds of typical EPS power curve is introduced in this paper, the mathematical model of the system, the EPS system mathematical model of the pure mechanical steering system is established in this paper, the target control of EPS system, the control strategy of EPS system of PID, this paper introduces three kinds of control mode of electric power steering in: power control mode, return control mode, the damping control mode, this paper focuses on the study of power control. Under pure mechanical steering system, EPS system and PID power control of EPS system based on the mathematical model, the application of MATLAB/Simulink simulation, parameters, and analysis of influence parameters on the stability of the system, and the use of PID control strategy for power control of the model, and that the system can meet the dynamic performance is very good.
Key words: electric power steering ; assist control ; MATLAB/Simulink; simulation

目 录
摘 要 III
Abstract IV
目 录 V
1 绪论 1
1.1 本课题的研究背景和意义 1
1.2 国内外的发展概况 1
1.3 本课题应达到的要求 2
2 电动转向系统的动力学模型 3
2.1 电动转向系统的结构和工作原理 3
2.2EPS典型助力曲线 5
2.3 EPS动力学的模型 7
2.3.1 机械转向系统数学模型 7
2.3.2 EPS系统的模型 8
2.4 EPS稳定性与转向助力增益分析 10
2.4.1 转向助力增益的确定 10
2.4.2 EPS稳定性与转向助力增益关系 11
3 EPS系统控制分析 16
3.1系统控制的目标 16
3.2 EPS系统的控制策略 16
3.3 系统的控制模式 17
3.4 系统的补偿控制 18
3.4.1 补偿控制原理 18
3.4.2 补偿控制的作用 18
4 EPS系统的仿真与分析 19
4.1 MATLAB/Simulink仿真平台的介绍 19
4.2 系统仿真参数取值 19
4.3 机械转向系统仿真与研究 20
4.3.1 机械转向系统的Simulink模型 20
4.3.2 汽车机械转向系统在阶跃输入时不同参数下的仿真研究 22
4.3.3 不同参数对系统性能影响的仿真分析 28
4.4 EPS转向系统仿真与研究 28
4.4.1 EPS系统的Simulink模型 28
4.4.2 EPS系统加入PID控制的Simulink模型 30
4.4.3 EPS系统加入PID控制的仿真与分析 32
4.5 不同系统的比较仿真与分析 36
5 结论与展望 40
5.1 主要结论 40
5.2 不足之处及未来展望 40
致 谢 41
参考文献 42
附 录 43