
具有CAN总线的数据采集器的设计(附程序代码)
无需注册登录,支付后按照提示操作即可获取该资料.
摘 要
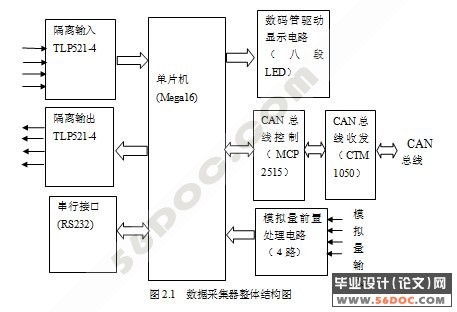
本文在系统介绍了CAN总线的由来、发展、基本概念、协议、技术规范等的基础上,还对组成系统节点的器件作了介绍、比较。该数据采集器电路有四路模拟量差分输入和四路数码管显示;开关量则是四路输入和四路输出,并有一个CAN总线通信口;以及一个RS232串行通信接口。本文以集成了CAN控制器的单片机 ATmega16、高速CAN收发器MCP2515及起光电隔离的CTM1050组成系统。其中,ATmega16是基于增强的AVR RISC结构的低功耗8 位CMOS微控制器,它不仅集成了一般单片机需要的外设,而且集成很有发展前景的现场总线――CAN总线控制器。本文还对该芯片中的CAN控制器结构作了详细的分析,并给出了系统的原理图和通信程序。
关键词:CAN总线;数据采集;C语言
CAN bus with the data acquisition (procedure)
Abstract
Based on the CAN bus system introduced the origin, development, and basic concepts, agreements, technical specifications, and so on the basis of, but also the composition of the device node system was introduced and compared. The data acquisition circuit simulation of a four-way differential input and the four-way digital display, is the four-way switch in four-way input and output, and a CAN bus communication mouth and a RS232 serial communication interface. Based on the integrated CAN controllers SCM ATmega16, high-speed CAN transceiver MCP2515 and isolation of the photoelectric effect CTM1050 component system. One, ATmega16 is based on the AVR RISC enhance the structure of the eight low-power CMOS microcontrollers, it not only integrates the needs of the general MCU peripherals, and integration is the development prospects of Fieldbus - CAN bus controller . This article is also in the chip CAN controller made a detailed analysis of the structure, and gives the system schematics and communication procedures.
Key Words:CAN bus; data acquisition; C language
研究的目的
虽然自CAN协议颁布迄今已经有十几年,它仍然在发展完善。CAN作为一个很有前途的现场总线,已经被越来越多的人所接受。在此研究CAN总线就是为了能够了解它的工作原理和应用技术,能够拓展自己的专业知识,为以后的学习工作打好基础。
研究的意义
由于CAN总线本身的特点,其应用范围目前已经不再局限与汽车行业,而扩展到了机械工业,纺织机械,机器人,数控机床,医疗器械,家用电器及传感器等领域发展。CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。从以上可以看出CAN的发展前景是相当好的,掌握CAN的原理与应用,对认识现场总线的发展方向具有很好的指导意义,依次作为一名电子类的工程技术人员研究CAN总线是非常必要的。

目 录 15000字
摘 要 I
Abstract II
引 言 1
1 CAN总线 3
1.1 CAN总线基础知识 3
1.1.1 CAN总线的定义 3
1.1.2 CAN总线的发展 3
1.2 CAN总线原理 4
1.2.1 CAN总线的工作 4
1.2.2 CAN总线的优点 4
1.3 研究CAN总线的目的和意义 5
1.3.1 研究的目的 5
1.3.2 研究的意义 6
2 具有CAN总线的数据采集器的硬件设计 6
2.1 数据采集器的基础知识 6
2.2 具有CAN总线数据采集器的整体方案 7
2.3 芯片的简单介绍 8
2.3.1 ATmega16芯片介绍 8
2.3.2 RS232芯片介绍 9
2.3.3 MCP2515芯片介绍 9
2.3.4 收发器芯片CTM1050功能说明 10
3 具有CAN总线数据采集器的软件设计 11
3.1 串行通信协议 11
3.2 初始化程序 15
3.3 主程序流程图 18
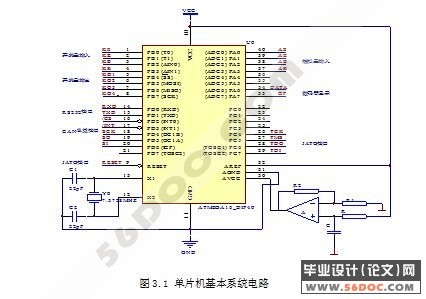
3.3.1 单片机(ATmega16)电路 18
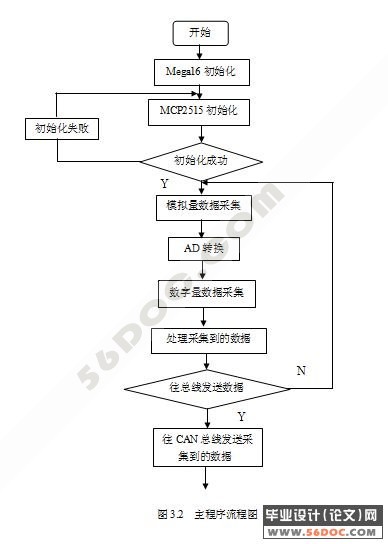
3.3.2 主程序流程图 18
3.4 数据采集模块的软件设计 20
3.4.1 四路模拟量输入及前置电路 20
3.4.2 数据采集A/D程序流程图 21
3.4.3 A/D转换程序 22
3.5 CAN协议模块的软件设计 25
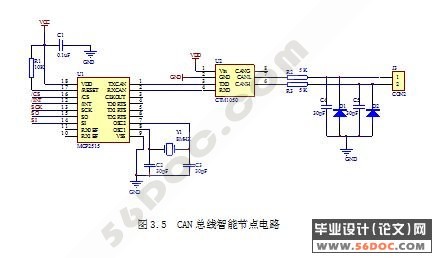
3.5.1 CAN总线智能节点接口电路 25
3.5.2 CAN总线智能节点接口流程图 26
3.5.3 CAN总线智能接口程序 27
3.6 开关量输入输出模块 35
3.6.1 四路开关量输入电路 35
3.6.2 四路开关量输出电路 35
结 论 37
参 考 文 献 38
附录 寄存器 40
致 谢 44
参 考 文 献
[1]邬宽明.《CAN总线原理和应用系统设计》[M]. 北京:北京航空航天大学出版社,1996.11
[2]饶运涛,邹继军,郑勇芸.《现场总线CAN原理与应用技术》[M]. 北京:北京航空航天大学
出版社,2003.11
[3]何立民.《单片机高级教程》[M]. 北京:北京航空航天大学出版社,2000.8
[4]何立民.《I2C总线应用系统设计》[M]. 北京:北京航空航天大学出版社,1995.2
[5]余永全.《ATMEL89系列单片机应用技术》[M]. 北京:北京航空航天大学出版社,2002.4
[6]李华.《MCS-51系列单片机实用接口技术》[M]. 北京:北京航空航天大学出版社,1993.8
[7]孙建华,刘总路,李春强. 《网络互连技术教程》[M]. 北京:人民邮电出版社,2005.2
[8]王锦标. 现场总线综述[J],冶金自动化,1998.6:pp1~6
[9]彭道刚,杨平,杨艳华.现场总线技术的现状与展望[J]. 机电一体化,2004.2,pp6~10
[10]王继国,吉东,孙新亚.CAN总线控制器MCP2515的原理及应用,电测与仪表,2004.1:pp52~56
[11]贾天宝,王彦,李俊德.CAN总线技术在远程监测系统中的应用[J]. 遥测遥控,2002.7:pp51~54
[12]ZNE-100T产品使用说明书,广州周立功单片机发展有限公司
[13]A Simple CAN Node Using the MCP2515 and PIC12C67X,application note AN215.pdf,www.microchip.com
[14]An In-depth Look at the MCP2515,application note AN739,pdf,www.microchip.com
[15]Understanding Microchip’s Can Module Bit Timing,application note AN754.pdf,www.microchip.com
[16]Upgrading from the MCP2515 to the MCP2515,application note AN872.pdf,www.microchip.com
[17]王晶,王家鼎.16位LED调光器PCA9532的原理与应用,电气自动化,2005.6(Z):pp80~82
[18]PCA9532 16-bit I2C LED dimmer datasheet, PHILIPS Semiconductor I2C devices for LED display control,application note AN264.pdf,PHILIPS Semiconductor,22 july 2002
[19]邹继军,饶运涛.CAN中继器设计及其应用,自动化与仪器仪表,2003.8,pp39~41
[20]Philips Semiconductors SJA1000 stand2alone CAN con2t roller [ Z] . DATA SHEET ,1997.
[21]Philips Semiconductors PCA82C250 CAN cont roller inter2face[ Z] . DA TA SHEET ,1997.
[22]张清.一种基于CAN总线的数据采集系统[J ].测控技术,2002 ,22(3) :24 - 27.
[23]吴楠.CAN总线综述[J ].单片机世界,1999 ,21(3): 16 - 19.
[24]SCHILL J . An overview of the CAN protocol [J ]. Embedded Systems
programming ,1997 ,14(2) :20 - 24.
[25]邬宽明. CAN总线系统设计的几个问题[J ] .电子技术应用,1998 ,32(8) :33 - 35
[26]周立功. ARM微控制器基础与实战[M].北京:北京航空航天大学出版社,2003.
[27] EISELE. Application note Paca82c250/ 251 CAN transceiver AN 96116
[28] Philips Semiconductors ,1996 ,12(1) :13 - 16.
[29]李毅峰,李令奇. 基于CAN 总线的分布式数据采集与控制系统
[30]工业控制计算机,2000 ,17(13) :34 - 38.
[31]刘景春,博洋. CAN2bus :开发系统解决方案[J ].单片机世界,1998 ,19(9) :41 - 45.
[32]刘武光.现场总线适配器的软硬件设计[J ].传感器世界,2001 ,25(9):54 - 57.